
در این فیلم آموزشی رایگان انواع نابالانسی را به طور کامل خدمتتان توضیح میدهم.
و به شما اطلاعات ارزشمندی درباره نابالانسی تکصفحهای، نابالانسی کوپل، نابالانسی دینامیکی و نابالانسی شفت یکسرگیردار (Overhung) داده شده است.
از طریق لینک زیر میتوانید فیلم انواع نابالانسی را دانلود و مشاهده نمایید: امیدوارم مورد توجه شما قرار گیرد و از دیدن آن لذت ببرید.
برای دانلود ویدئو اینجا کلیک کنید
انواع نابالانسی: 1- نابالانسی تکصفحهای
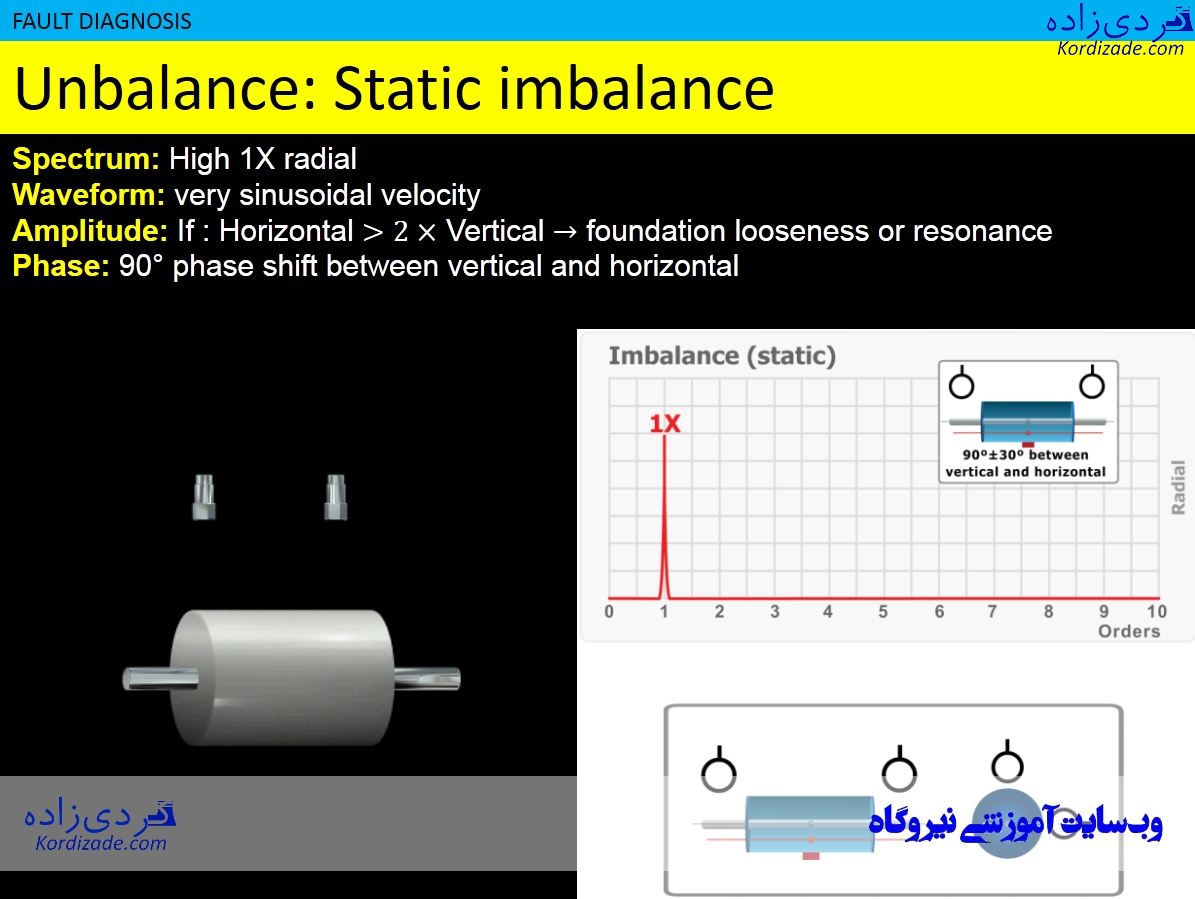
ساده ترین شکل در انواع نابالانسی، نابالانسی تکصفحهای بوده که به نابالانسی استاتیکی (Static Imbalance) نیز معروف است؛
این عیب زمانی مشاهده میشود که یک جرم سنگین در یک یک نقطه از شفت دوار قرار داده شود.
دامنه
اگر فرکانسی که ماشین در آن بهرهبرداری میشود از اولین فرکانس بحرانی ماشین کمتر باشد،
دامنه ارتعاش زیر اولین سرعت بحرانی متناسب با مربع سرعت رشد میکند.
مثلا افزایش سه برابری سرعت باعث رشد 9 برابری ارتعاش میشود.
فرکانس
همچنین فرکانس X1 یا یک برابر دور شفت همیشه وجود دارد
و معمولاً در نمودار طیف فرکانسی یا اسپکتروم شاخص است.
درصورتیکه دامنه سیگنال در راستای عمود بر شفت و در جهت افقی یعنی محور y
نسبت به دامنه سیگنال در راستای عمود بر شفت و در جهت عمودی یعنی محور x ، دو برابر باشد،
ارتعاشات ماشین به خاطر عیوب دیگری مانند رزونانس و لقی در فونداسیون ماشین است و ارتباطی با انواع نابالانسی ندارد.
سیگنال در حوزه زمان
سیگنال در حوزه زمان (time wave form signal) نابالانسی تکصفحهای در واحد سرعت به شکل سینوسی می باشد.
البته به شرطی که سایر عیوب مانند لقی و ناهم محوری در ماشین وجود نداشته باشد.
فاز
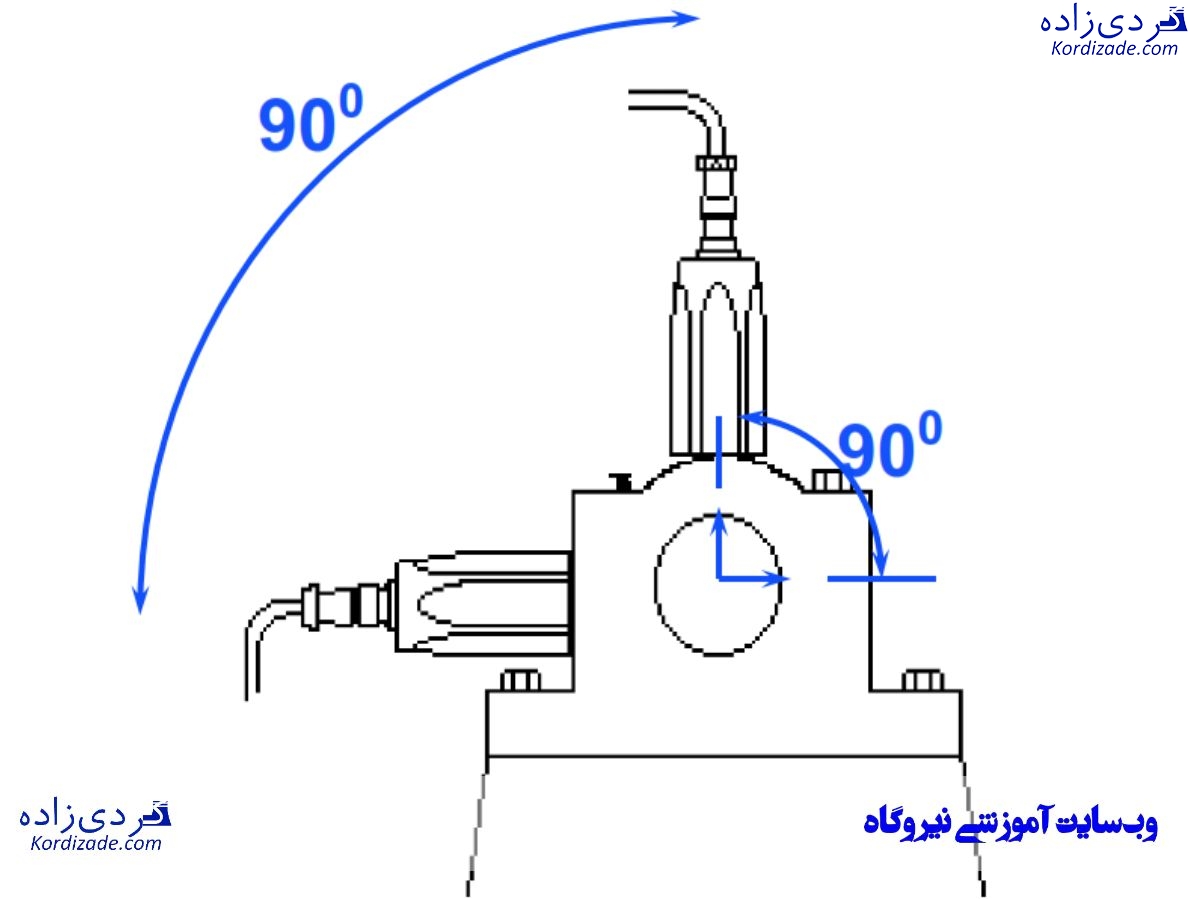
اگر عیب ماشین نابالانسی تکصفحهای باشد، همانطور که در شکل زیر مشاهده میکنید،
یکی از سنسورهای شتاب سنج دستگاه آنالایزر ارتعاشات دوکاناله را در راستای محور y روی بیرینگ سمت راست بگذارید،
سپس سنسور دیگر را در همان راستای y ولی روی بیرینگ سمت چپ قرار دهید و از ماشین دادهبرداری کنید؛
اختلاف فازی بین سیگنالهای برداشتشده مشاهده نمیشود.
همچنین در راستای محور x روی دو بیرینگ در دو طرف شفت، همین رفتار را در مورد زاویه فاز مشاهده میکنید.

اختلاف فاز بین قرائتهای جهت افقی (محور y) و عمودی (محور x) روی هرکدام از بیرینگها، تقریباً 90 درجه است.
ممکن است بپرسید که چرا اختلاف فاز «تقریباً» 90 درجه است و «دقیقاً» 90 درجه نمیباشد؟
مگر نه اینکه سنسورها دقیقاً 90 درجه نسبت به هم نصب شدهاند،
پس چرا زاویه فازی که سنسور اول اندازهگیری کرده است با زاویه فازی که سنسور دوم برداشت میکند، دقیقاً 90 درجه اختلاف ندارد؟
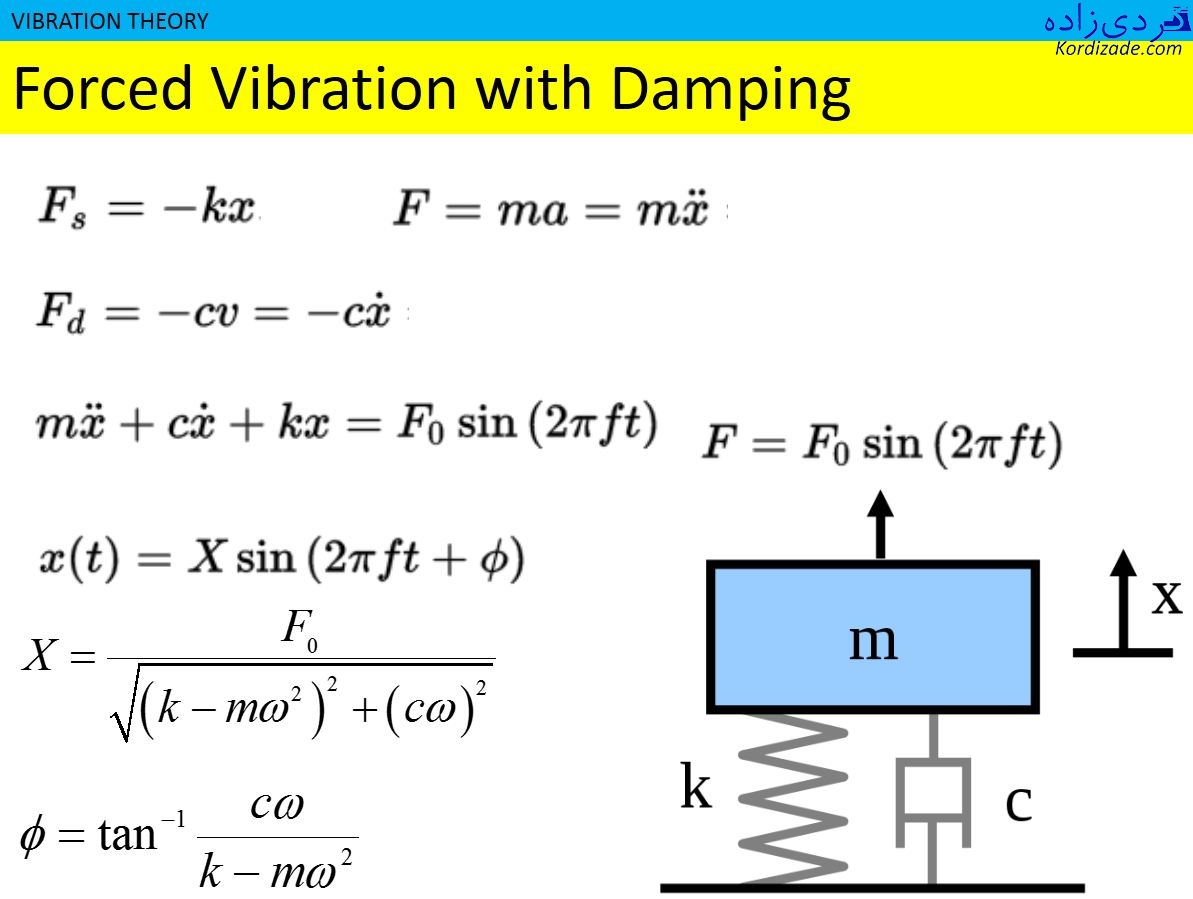
در پاسخ باید بگویم:معادلات دینامیکی ماشینی مانند شفت توربین که دچار نابالانسی هستند، به قرار زیر است:
همانطور که در تصویر زیر مشاهده میکنید، همواره معادله پاسخ سیستم یعنی (Xsin(wt+Φ
نسبت به معادله نیروی تحریک واردشده به سیستم که در اینجا یکی از انواع نابالانسی با این معادله است (FºSin(wt ،
به اندازه زاویه فاز یا Φ، عقبتر است.
ازآنجاییکه اندازه زاویه فاز بهسرعت دورانی (w)، فنریت (K)، ضریب میرایی (C) و جرم شفت (M) وابسته است،
با تغییر جهت اندازهگیری و محل قرارگیری سنسور،
اگر چه جرم و سرعت دورانی شفت ثابت است بااینحال فنریت و ضریب میرایی آن ممکن است تغییر کند؛
بنابراین عقبافتادگی پاسخ از تحریک در جهات مختلف اندازهگیری متفاوت است؛
مقاله “ نابالانسی چیست ؟ ” را از دست ندهید.
بهعنوانمثال اگر در راستای عمود به شفت و در جهت y، پاسخ از تحریک، 10 درجه عقب باشد
و در راستای x پاسخ از تحریک، 20 درجه عقب بیفتد،
اختلاف فاز (تأکید میکنم اختلاف فاز تا با فاز اشتباه نگیرید) اندازهگیری شده در جهات x و y در این مثال، 80 درجه است و دقیقاً 90 درجه نمیباشد.
اختلاف فاز 90 درجه جهات x و y در ماشینهایی صادق است که زاویه عقبافتادگی پاسخ و تحریک در جهات مختلف یکسان باشد؛
مثلاً در بعضی از یاتاقانهای سیمتریک در اکثر موارد با چرخش 90 درجه سنسور و اندازهگیری زاویه فاز در راستای X و Y، زاویه فاز نیز 90 درجه میچرخد.
اگر یاتاقان سیمتریک نباشد این قضیه برقرار نیست؛ بنابراین 30±درجه اختلاف فاز در اندازهگیری در جهات مختلف عمود بر شفت، قابلقبول است.
انواع نابالانسی: 2- نابالانسی کوپل
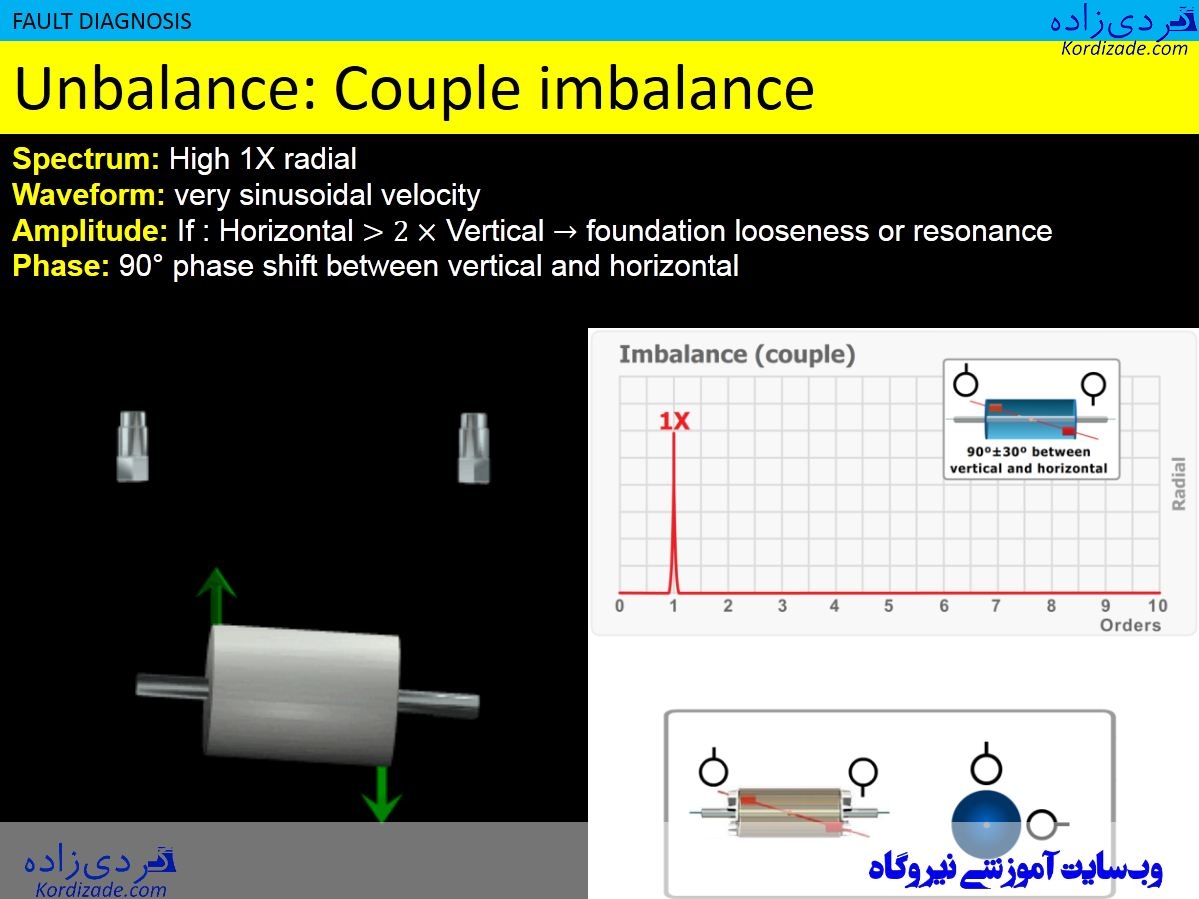
یکی دیگر از انواع نابالانسی، نابالانسی کوپل می باشد.
نابالانسی کوپل باعث اختلاف فاز 180 درجه روی شفت میشود.
دامنه
دامنه ارتعاش متناسب با مربع سرعت رشد میکند و باعث رشد ارتعاش محوری و شعاعی میشود.
در صورت انجام عملیات بالانس، جرم اصلاحی جهت رفع عیب نابالانسی کوپل، حداقل میبایست در دو صفحه اعمال شود.
فرکانس
1X همیشه وجود دارد و معمولاً در طیف شاخص است.
اگر فرکانسی که ماشین در آن بهرهبرداری میشود از اولین فرکانس بحرانی ماشین کمتر باشد،
سیگنال در حوزه زمان
سیگنال در حوزه زمان (time wave form signal) این عیب در واحد سرعت به شکل سینوسی می باشد البته به شرطی که سایر عیوب مانند لقی و ناهم محوری در ماشین وجود نداشته باشد.
فاز
به خاطر داشته باشید که میبایست اختلاف فاز 180 درجه بین جهت افقی بیرینگهای دو طرف شفت (y)
و به همین ترتیب در جهت عمودی دو بیرینگ دو طرف شفت (x) وجود داشته باشد؛
اختلاف فاز تقریبی 90 درجه میبایست بین قرائتهای جهت افقی (y) و عمودی (x) در هر بیرینگ طرفین شفت نیز وجود داشته باشد.
انواع نابالانسی: 3-نابالانسی دینامیکی
در بین انواع نابالانسی ، نابالانسی دینامیکی شایعترین نوع نابالانسی است و ترکیبی از نابالانسی کوپل و تکصفحهای میباشد.
1X در طیف فرکانسی شاخص است و اصلاح این عیب، جرم گذاری در دو صفحه را نیاز دارد.
اختلاف فاز شعاعی بین بیرینگهای دو طرف شفت میتواند از صفر تا 180 درجه باشد و عدد ثابتی ندارد؛
بااینحال هنگامیکه اندازهگیری از بیرینگهای دو طرف شفت انجام میشود،
میبایست اختلاف فاز افقی (y) نزدیک به اختلاف فاز عمودی (x) باشد و نهایتاً 30± درجه تفاوت داشته باشند.
درصورتیکه نابالانسی دینامیکی زیاد باشد، اختلاف فاز بین قرائتهای افقی و عمودی هر بیرینگ میتواند تا 40± درجه تغییر کند.

در صورت که عیوب دیگری مانند لقی و ناهم راستایی در ماشین وجود نداشته باشد،
شکل موج تابعی زمانی (time wave form signal) این عیب در واحد سرعت به شکل سینوسی می باشد.
فیلم رایگان تفاوت آنبالانسی و میس الاینمت با آنالیز ارتعاشات ماشین
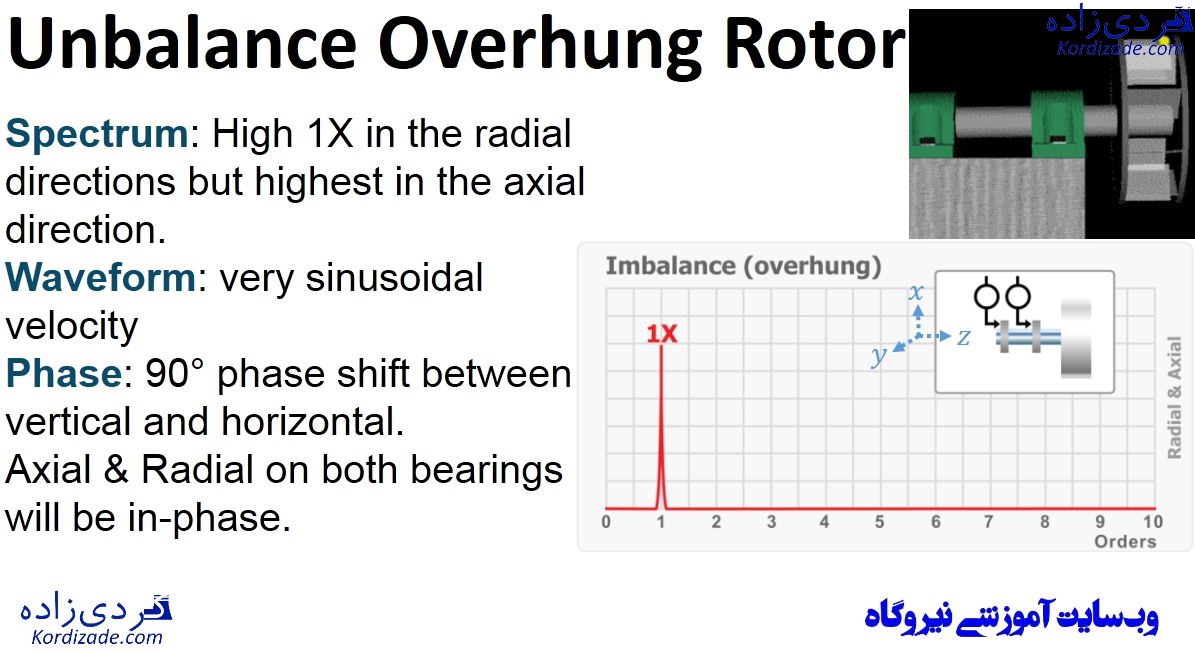
انواع نابالانسی: 4- نابالانسی شفت یکسرگیردار (Overhung)
آخرین نوع از انواع نابالانسی، نابالانسی شفت یکسرگیردار می باشد.
دامنه
ارتعاشات در جهت z بیشترین دامنه را دارد.
علت افزایش دامنه ارتعاش در جهت محوری (z) به دلیل گشتاور خمشی (bending moment) ایجاد شده در شفت است.
فرکانس
این نابالانسی باعث X1 زیاد در جهت شعاعی یعنی جهات x و y و جهت محوری یعنی z میشود.
فاز
قرائتهای فاز در جهت محوری (z) تمایل دارند که همفاز باشند؛
درحالیکه قرائتهای فاز شعاعی (x وy) ممکن است ناپایدار باشند؛
بااینحال اختلاف فازهای افقی (y) معمولاً نزدیک به اختلاف فازهای عمودی (x) شفت نابالانس میباشد
و ممکن است تا 30± متفاوت باشد.
شفتهای یکسرگیردار دچار هر دو نوع نابالانسی کوپل و تکصفحهای هستند، که هرکدام نیاز به اصلاح دارد؛
بنابراین جرمهای اصلاحی همواره باید روی دو صفحه اعمال شوند تا هر دو نوع نابالانسی رفع گردد.





1 دیدگاه در “انواع نابالانسی :استاتیکی،کوپل،دینامیکی و Overhung”
ممنونم مهندس.