تشخیص خطا یا عیبیابی در ماشینهای دوار با آنالیز ارتعاشات یکی از پارامترهای مهم در نگهداری این ماشینها محسوب شده و از دیرباز مورد توجه قرار گرفته است. استفاده از ارتعاش برای مانیتورینگ و عیبیابی از ۵۰ سال پیش آغاز گردید. تشخیص مشکل ماشینها از روی عارضههای ثانویه در آنها علاوه بر رفع عیب پیشآمده از خرابی و استهلاک بیشتر ماشین نیز جلوگیری خواهد کرد.
امروزه به علت رقابتهای تجاری و حتی نظامی و بزرگی بیش از اندازه و اهمیت ماشینها، تشخیص خطا در این سیستمهای نیز
اهمیت بیشتری یافته است. اهمیت عیبیابی سریع در ماشینهای حساس و بزرگ بیشتر بخاطر جلوگیری از خروج ماشین از
سرویس و یا عدم تولید است که هزینه ناشی از آن در خیلی از موارد به مراتب بیشتر از رفع عیب میباشد.
آنالیز ارتعاشات یکی از روشهای مرسوم در عیبیابی ماشینهای دوار محسوب میگردد. به علت ماهیت دینامیکی این ماشینها و
تغییر مشخصههای دینامیکی آنها در اثر پیدایش عیوب مختلف و در نتیجه نحوه تغییر پاسخ آنها، در روشهای عیبیابی مؤثر
میباشند. عیبیابی با ارتعاشات در ماشینها از سالها پیش و بخصوص با پیشرفت وسایل اندازهگیری و پردازش ارتعاشات مورد
توجه بوده و روز بروز کاملتر شده است
نامیزانی و عدم نصب صحیح در ماشینهای دوار از عیوب شایع محسوب شده و از منابع اصلی ارتعاشی در این ماشینها بشمار
میروند. مشکل نامیزانی در ماشینها بسیار شایعتر بوده و با استفاده از عارضههای ارتعاشی به آسانی قابل تشخیص است. تحليل
فرکانس و زاویه فاز در جهت شعاعی این عیب را مشخص میکند. اما عدم نصب صحیح در ماشینهای دوار اثر پیچیدهتری دارد و
مؤلفههای ارتعاشی متفاوتی را ایجاد میکند.
در این مقاله نحوه تشخیص این عیب با نمایشهای هارمونیکهای مختلف و اثرات فرکانس طبیعی بیان میشود.
علت ارتعاشات عدم هم محوری
عدم نصب صحیح یا عدم هممحوری در ماشینهای دوار عبارت است از تغییر در بخشی از ماشین به نحوی که امتداد محورهای
شفتها در یک راستا و در امتداد همدیگر نباشند. در اتصال بخش محرک به متحرک از کوپلینگ استفاده میگردد عوامل مختلفی
نظیر نشست تکیهگاهها تغییر شکل بخشی از سیستم، خرابی یا تلرانس زیاد در نصب کوپلینگها سبب میگردند که امتداد محورها
همراستا نباشند. بطور کلی دو نوع عدم هممحوری در ماشینها وجود دارد که عبارتند از: عدم هممحوری موازی و زاویهای. در حالت
اول امتداد شفتها همدیگر را قطع نمیکنند و موازی یکدیگر باقی میمانند در حالت دوم امتداد محورها با زاویه همدیگر را قطع
میکنند. در عمل ترکیب این دو حالت متداول است.
اثرات ارتعاشات عدم هم محوری
در اثر عدم نصب صحیح و یا عدم هممحوری بخصوص در کوپلینگهای صلب، نیروها و ممانهای اضافی در محل اتصال محورها
حاصل میگردند مقدار این نیروها و ممانها که به کل ماشین اعمال میگردند متناسب با دور محور بوده و بصورت پریودیک جهت و
مقدار آنها تغییر میکند. اثر این عیب همانند نامیزانی یک تحریک خارجی اعمالی بر ماشین در نظر گرفته میشود اگر مقدار جابجایی
در اثر این مشکل از حد مجاز تجاوز نکند و عیوب دیگری همانند ناپایداری در یاتاقانهای روغنی و تماس و سایش را پدید نیاورد
میتوان معادله حرکت سیستم را خطی فرض کرده و به صورت زیر نوشت:
 که در رابطه فوق M، C و K به ترتیب مقادیر جرم، میرائی و سختی مجموعه را بیان میکنند. q بردار جابجایی و و مشتقات اول و
که در رابطه فوق M، C و K به ترتیب مقادیر جرم، میرائی و سختی مجموعه را بیان میکنند. q بردار جابجایی و و مشتقات اول و
دوم آن نسبت به زمان هستند. Qu نیروی ناشی از نامیزانی و Qm نیروی ناشی از عدم نصب صحیح است. با محاسبه این نیروها و
بسط آنها بر حسب جملات سینوسی و کسینوسی میتوان پاسخ متناظر با هارمونیکهای مختلف را بدست آورد.
پاسخ فرکانسی و نحوه نمایش ارتعاشات عدم هم محوری
در ماشینهای دوار مقدار نامیزانی پسماند متناظر با جرم آنهاست و هر چه اندازه ماشین بزرگتر باشد این مقدار نامیزانی بیشتر
خواهد بود. در نتیجه در پاسخ فرکانسی مؤلفه 1×RPM که در اثر نامیزانی و عدم هممحوری تحریک میگردد نسبت به سایر مؤلفهها
افزایش بیشتری خواهد داشت و در نتیجه مقایسه مستقیم آن با هارمونیکهای مختلف نتایج صحیحی را نشان نمیدهد. جهت
بررسی اثر عدم هممحوری شکل (۱) در نظر گرفته شده و تنها اثر عدم هممحوری موازی بررسی میگردد. شفت (۱) محرک و شفت (۲)
متحرک است. شعاع شفت متحرک برابر R و مقدار جابجایی دو شفت برابر ρ در نظر گرفته میشود. اگر دور شفت محرک برابر باشد
میتوان نوشت:
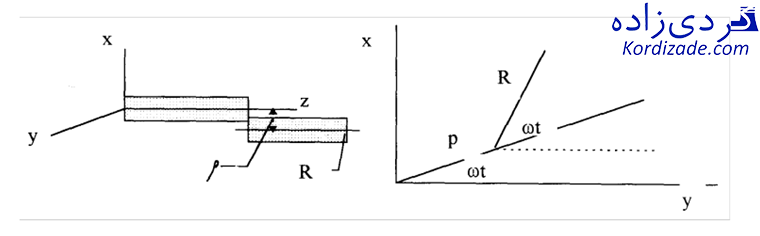 شکل 1- بررسی جابجایی دو شفت نسبت به هم
شکل 1- بررسی جابجایی دو شفت نسبت به هم
 نیروی ناشی از نامیزانی متناسب با جرم نامیزانی m و فاصله آن از مرکز دورانی (r) میباشد و برابر است با:
نیروی ناشی از نامیزانی متناسب با جرم نامیزانی m و فاصله آن از مرکز دورانی (r) میباشد و برابر است با:
 و پاسخ آن نیز متناظر است با:
و پاسخ آن نیز متناظر است با:

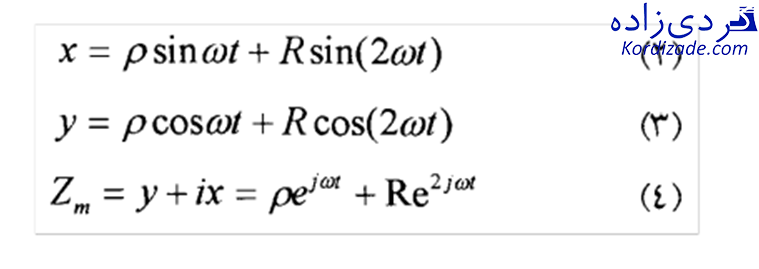
در نتیجه پاسخ کلی سیستم ترکیب دو جواب (۵) و (۶) خواهد بود. در معادله (۴) پاسخ سیستم در اثر عدم هممحوری متشکل از دو
بخش است که بخش اول هارمونیک اول بوده و مقدار دامنه در آن متناظر با ρ بوده و در بخش دوم فرکانس 2×RPM ظاهر گشته و
دامنه آن متناظر با R است چون R در مقایسه با ρ بزرگ است در نتیجه مؤلفه 2×RPM نسبت به 1×RPM نیز بزرگ خواهد بود. اما
در اثر نامیزانی سیستم مؤلفه 1×RPM توسط نامیزانی نیز تحریک میگردد و چون در ماشینهای بزرگ مقدار آن زیاد است در نتیجه
مؤلفه 1×RPM نسبت به 2×RPM در پاسخ فرکانسی بسیار بزرگتر خواهد بود. جهت تشخیص عیب ماشین در این حالت باید اثر
نامیزانی را حذف کرد برای این منظور لازم است که مشخصههای ارتعاشی سیستم که همان دامنه متناظر با این مؤلفهها است قبل از
بروز عیب (در حالت کارکرد ماشین در شرایط عادی) در تاریخچه ماشین ثبت گردند با مقایسه مقادیر ثبت شده در شرایط عادی با
مقادیر آن پس از بروز مشکل میتوان مقدار افزایش مؤلفه 2×RPM را مشاهده کرد.
شكل مدها و موفقیت اجزاء ارتعاشات عدم هم محوری
در بیشتر موارد و بخصوص در حالت مانیتورینگ دورهای ماشین، تاریخچه ماشین و مشخصههای ارتعاشی آن ثبت نمیگردند و در
نتیجه مقایسه مؤلفههای مختلف غالباً امکانپذیر نیست در این حالت توجه به شکل مدهای ماشین و همچنین موقعیت اجزای
مختلف نظیر کوپلینگها بسیار مهم است. پاسخ ارتعاشی یک ماشین را میتوان بر حسب شكل مدهای متعامد آن بصورت زیر نوشت:
 که در آن شكل مد iام و درصد تاثیر شکل مد iام در پاسخ سیستم است. مقدار با توجه به نحوه اعمال نیرو تعیین میگردد. عدم
که در آن شكل مد iام و درصد تاثیر شکل مد iام در پاسخ سیستم است. مقدار با توجه به نحوه اعمال نیرو تعیین میگردد. عدم
نصب صحیح ماشین و بخصوص نصب نادرست و یا خرابی کوپلینگ تاثیر بسزائی در تحریک شكل مدها دارند. شکل مد دوم ماشین
(مجموعه توربوژنراتور) بصورت (S) افقی است که کوپلینگ در وسط قرار میگیرد با جابجایی دو بخش (محرک و متحرک) توربین
و ژنراتور غالباً شکل مد دوم بیشتر تحریک میگردد و در نتیجه سهم آن در پاسخ سیستم افزایش مییابد.
در این حالت با مانیتور کردن ارتعاش کلی سیستم در گذر از فرکانس طبیعی دوم دامنه به شدت افزایش مییابد. که این مقدار
افزایش از حالت بدون عیب بسیار زیادتر است.
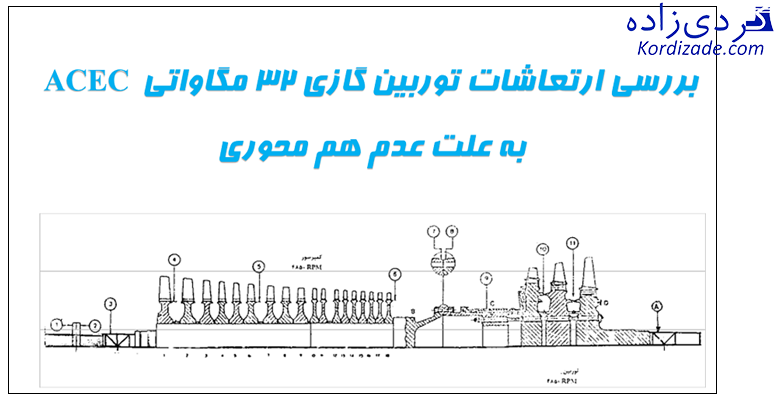
مثال واقعی از ارتعاشات عدم هم محوری: توربین گازی 32 مگاواتی ACEC
برای بررسی مطالب گفته شده، یک واحد 32 مگاواتی گازی ACEC مورد بررسی قرار گرفته است. نمای کلی سیستم در شکل (۲)
نشان داده شده و سایر مشخصات آن به شرح زیر میباشند:
فرکانس طبیعی اول: (1100-1300) RPM
فرکانس طبیعی دوم: (3000-3400) RPM
سرعت کارکرد نامی: 4800RPM و دامنه پاسخ (50-75)
دامنه در حالت هشدار: 100
دامنه در حالت در حالت توقف: 150
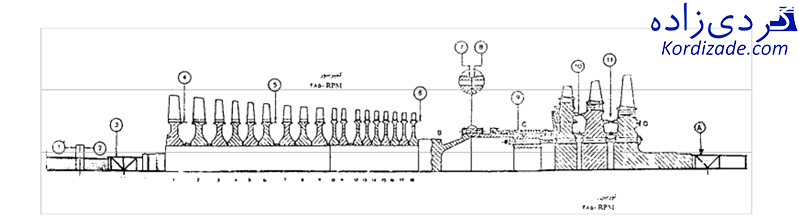
شکل 2- نمای جانبی مجموعه توربوژنراتور
واحد مذکور به علت مشکلات مربوط به خرابی پرهها و سایر تعمیرات باز شده و پس از تعمیرات اساسی، تعویض پرهها و بالانس در
محل، مجدداً نصب گردیده است. در راهاندازی سیستم مقدار دامنه بر حسب دور در جدول (۱) ثبت شده است.
جدول 1- دامنه ارتعاشات کلی در حین راهاندزی توربین روی پوسته یاتاقان A
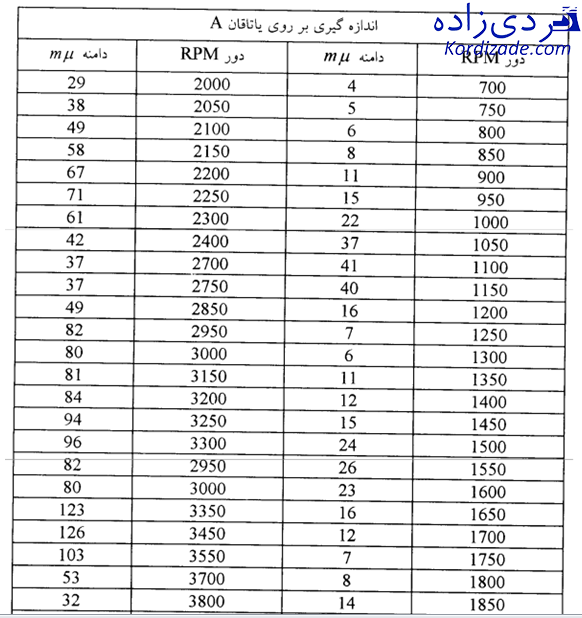
چنانکه مشاهده میگردد دامنه افزایش یافته و در گذر از فرکانس طبیعی دوم مقدار آن از مقدار مجاز تجاوز کرده است. در این حالت
عدم نصب صحیح سیستم میتواند به عنوان مشکل اساسی در این مجموعه عنوان شود توجه به شکل مدها و موقعیت اندازهگیری و
اجزاء روی شکل مدها جهت تشخیص دقیقتر عیب میتواند مؤثر باشد. در پاسخ فرکانسی سیستم نیز تنها مؤلفه 1×RPM غالب بوده
و مؤلفههای دیگر در مقایسه با آن صرفنظر شدهاند که این نحوه مقایسه از دقت در عیبیابی میکاهد.
بحث و نتیجهگیری ارتعاشات عدم هم محوری
با توجه به مطالب ذکر شده، نحوه نمایش دامنه ارتعاش، دامنه متناظر با فرکانسهای مختلف و مقایسه آنها در جهت تشخیص عیب
ماشینها بسیار مهم هستند. نکته اساسی دیگر در مقایسه دامنه مؤلفههای متناظر با هارمونیکهای مختلف ابعاد ماشین میباشند
در ماشینهای بزرگ که جرم آنها زیاد است (نظير توربوژنراتورها) مقایسه دامنه متناظر با فرکانسهای مختلف با دامنه متناظر قبل از
بروز عیب باید صورت گیرد. از دیگر موارد مهم در عیبیابی ماشینها بخصوص در حالت مانیتورینگ دورهای توجه به شکل مدها،
فرکانسهای طبیعی و موقعیت اجزاء مختلف روی سیستم و همچنین تاریخچه تعمیرات ماشین است. افزایش دامنه در گذر از
فرکانس طبیعی دوم بیش از مقدار پیشبینی شده میتواند دلیلی بر عدم نصب صحیح ماشین و یا خرابی در محل کوپلینگها باشد.
به منظور دستیابی به دقت در تشخیص خرابی و عیب ناشی از عدم نصب صحیح سیستم پیشنهاد میشود که اندازهگیری در جهت
محوری نیز صورت گیرد. در حالت عدم نصب صحیح، غالباً در امتداد محوری نیز مؤلفه ارتعاشی قابل ملاحظهای ایجاد میگردد که
علت آن عدم همراستایی محورها و حتی خمیدگی پیشآمده در محور در اثر نصب نادرست است. ثبت این دامنه در حالت قبل و بعد
از بروز مشکل و مقایسه آنها به تشخیص این عیب کمک خواهد کرد.
منبع:
دكتر مهدي بهزاد، مسعود آسايش “تشخيص عدم نصب صحيح ماشينهاي دوار با آناليز ارتعاشات” – پانزدهمین کنفرانس بین المللی برق