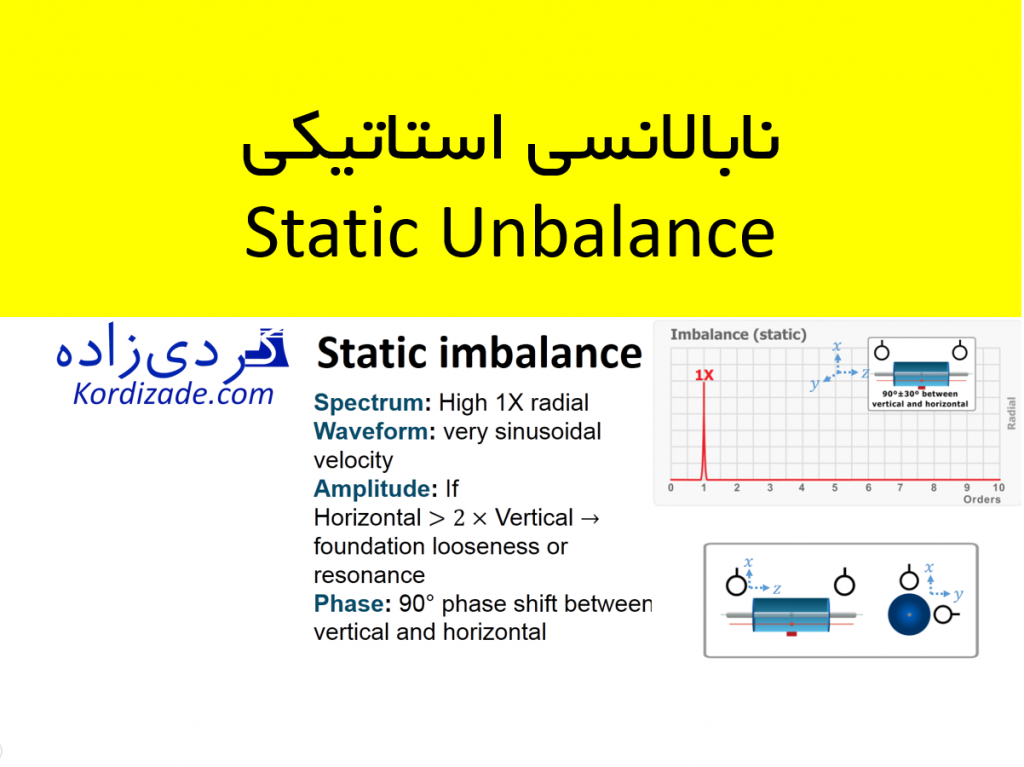
آنبالانسی استاتیکی ( Static Imbalance)، سادهترین شکل آنبالانسی است و به آنبالانسی تکصفحهای معروف است؛ زیرا جرم سنگین، فقط در یک نقطه از شفت دوار قرار گرفته است و چون در زمان ساکنبودن شفت نیز وجود دارد، به آن آنبالانسی استاتیکی نیز میگویند. معمولاً در نمودار طیف فرکانسی، فرکانس X1 یا یک برابر دور شفت همیشه وجود دارد و شاخص است.
اگر دامنه سیگنال در جهت دو برابر دامنه سیگنال در جهت باشد، احتمالاً ارتعاشات ماشین به خاطر عیوب دیگری مانند رزونانس و لقی فونداسیون ماشین است و به آنبالانسی ارتباط ندارد. اگر عیوب دیگر مانند لقی و ناهممحوری در ماشین وجود نداشته باشد، شکل موج زمانی آنبالانسی استاتیکی در واحد سرعت، سینوسی است.
شکل 1 نابالانسی تکصفحهای
تصور کنید عیب ماشین، آنبالانسی استاتیکی باشد. اگر یکی از سنسورهای شتابسنج دستگاه آنالایزر ارتعاشات دوکاناله را در راستای محور روی بیرینگ سمت راست بگذارید، سپس سنسور دیگر را در همان راستای و روی بیرینگ سمت چپ قرار دهید و از ماشین دادهبرداری کنید، بین این دو سیگنال، اختلاف فاز دیده نمیشود. راستای محور روی دو بیرینگ نیز، همین گونه است و زاویه فاز تغییر نمیکند؛ زیرا در آنبالانسی استاتیکی، نيروهايي كه به یاتاقانها وارد میشوند، همجهت هستند و در نتیجه، تمام نقاط قسمت چرخان، به صورت همفاز ارتعاش میكنند.

شکل 2 اندازهگیری زاویه فاز در روی دو یاتاقان
همان گونه که در شکل 3 میبینید، اختلاف فاز راستای و روی یک بیرینگ، تقریباً 90 درجه است. شاید بپرسید چرا اختلاف فاز «تقریباً» 90 درجه است و «دقیقاً» 90 درجه نیست؟ مگر نه اینکه سنسورها دقیقاً با زاویه 90 درجه نسبت به هم نصب شدهاند، پس چرا با فرض حذف شدن تمام خطاهای اندازه گیری مانند الکترونیک دستگاه آنالایزر، زاویه فازی که سنسور اول اندازه گرفته، با زاویه فازی که سنسور دوم برداشت کرده است، دقیقاً 90 درجه اختلاف ندارد؟

شکل 3 اختلاف فاز بین قرائتهای جهت افقی (محور y)و عمودی (محور x)

در پاسخ باید گفت: همان گونه که در شکل 4 گفته شد، همواره معادله پاسخ سیستم، یعنی x(t)=Xsin(2πft-ϕ) نسبت به معادله نیروی تحریک واردشده به سیستم (در اینجا نیروی آنبالانسی با معادله F(t)=F_0 sin(2πft))، به اندازه زاویه فاز ϕ، عقبتر است. اندازه زاویه فاز به سرعت دورانی (ω=2πf)، فنریت (k)، ضریب میرایی (c) و جرم شفت (m) وابسته است. بنابراین با تغییر جهت اندازهگیری و محل قرارگیری سنسور، اگرچه جرم و سرعت دورانی شفت ثابت است، ولی فنریت و ضریب میرایی آن ممکن است با تغییر جهت اندازهگیری، تغییر کند. بنابراین عقبافتادگی پاسخ از تحریک، در جهتهای مختلف اندازهگیری، متفاوت است. برای مثال، اگر در جهت ، پاسخ از تحریک به اندازه 10 درجه عقب باشد و در جهت ، پاسخ از تحریک 20 درجه عقب بیفتد، اختلاف فاز اندازهگیریشده در جهتهای و ، 80 درجه است و دقیقاً 90 درجه نیست. بنابراین اختلاف فاز 90 درجه راستای و ، در ماشینهایی صدق میکند که زاویه عقبافتادگی پاسخ از تحریک، در جهتهای مختلف یکسان باشد. برای مثال، در یاتاقانهای سیمتریک (Symmetrical rigid bearing) معمولاً با چرخش 90 درجهای سنسور در راستای و ، زاویه فاز نیز 90 درجه تغییر میکند. در غیر این صورت و در صورت غالب بودن عیب آنبالانسی، اختلاف فاز در جهتهای مختلف عمود بر شفت، معمولاً کمتر از 30±درجه است.
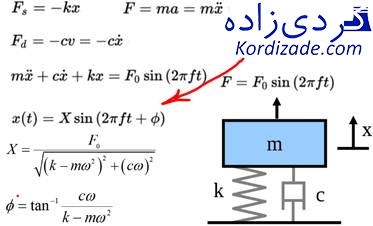
شکل 4 معادلات دینامیکی ماشین دچار عیب نابالانسی





2 دیدگاه در “نابالانسی استاتیکی (Static Unbalance)”
عالی بود
سپاس گزارم پدر عزیزم
در این وبسایت تمام سعی من این بوده که بتونم خدمت کنم به فراگیرها. اگرچه اسم معلم فقط برازنده شماست و من فقط تسهیل گیر آموزشی هستم