10% از خرابیهای الکتروموتورها مربوط به عیوب روتور در موتورهای القایی جریان متناوب بوده و شایعترین عیوب روتور به قرار زیر است:
- شکستگی، ترک و شل شدن میلههای روتور (Rotor Bar)
- شکستگی یا ترک حلقههای انتهایی (End Ring)
- لقی بین حلقههای انتهایی و میلههای روتور
- تخریب لایههای عایقی هسته روتور (Rotor Lamination)
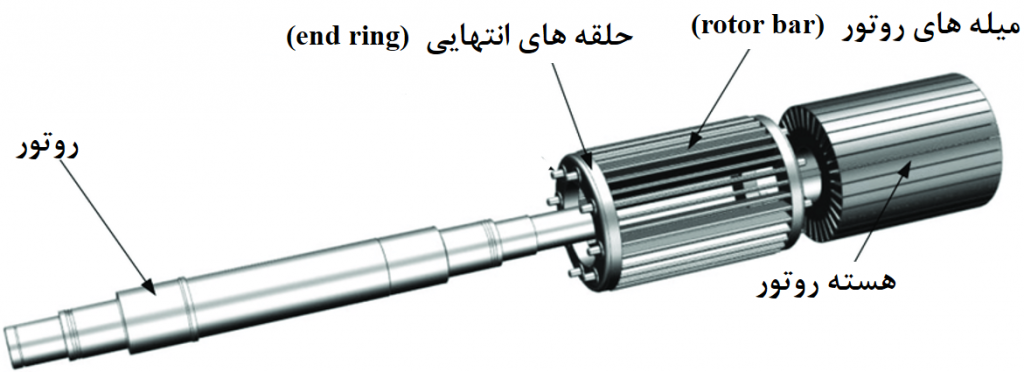
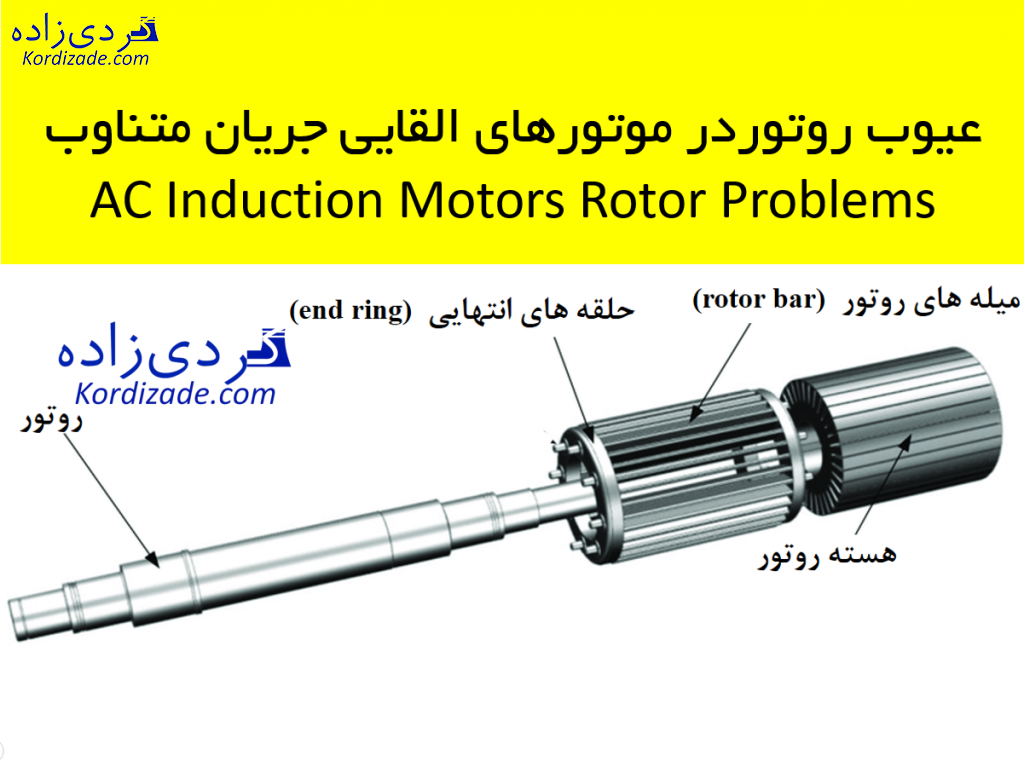
اجزای روتور در موتورهای القائی جریان متناوب
تمامی این عیوب باعث ایجاد ارتعاشات در فرکانسهای 1X و هارمونیکهای آن به همراه مجاورهای میشود. مثلاً همانطور که در شکل زیر نشان دادهشده است، در طیف فرکانسی شکستگی یا ترک میلههای روتور، ارتعاشات در فرکانس 1X و هارمونیکهای 2X, 3X, 4X, 5X با مجاورهای PPF، دامنه غالب دارند.
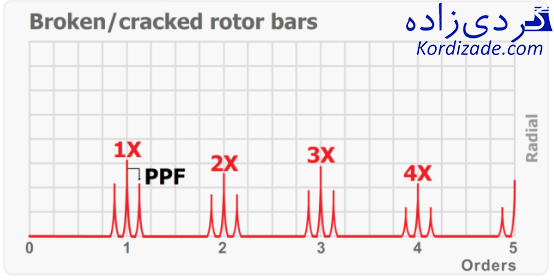
طیف فرکانسی شکستگی یا ترک میلههای روتور
همانطور که در شکل زیر مشاهده میکنید، شل یا باز بودن میلههای روتور با ساید بندهای ![]() 2 که حول RBF تشکیل میشود، شناسایی میشود. (RBF (Rotor Bar Frequency فرکانسی است که میلههای روتور يك موتور القايي AC از يك نقطه مرجع مشخص عبور ميكند. مقدار RBF به کمک رابطه زیر محاسبه میشود:
2 که حول RBF تشکیل میشود، شناسایی میشود. (RBF (Rotor Bar Frequency فرکانسی است که میلههای روتور يك موتور القايي AC از يك نقطه مرجع مشخص عبور ميكند. مقدار RBF به کمک رابطه زیر محاسبه میشود:
RBF = سرعت كاري موتور × تعداد روتور بارها
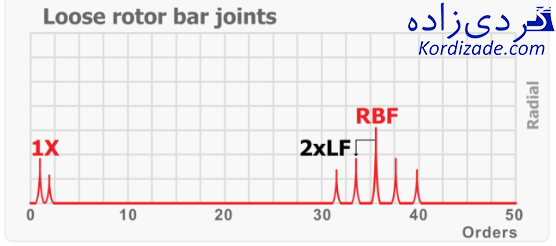
طیف فرکانسی شل یا باز بودن میلههای روتور
درصورتیکه بین میلههای روتور و رینگ انتهایی جرقه ایجاد شود، دامنههای بالایی در RBF2 با مجاورهای ![]() 2 ایجادشده اما افزایش کمی در دامنه RBF1 پدیدار میشود.
2 ایجادشده اما افزایش کمی در دامنه RBF1 پدیدار میشود.