مقدمه
در تاسیسات الکتریکی مانند شبکه نقل انرژی، ژنراتورها، ترانسها، موتورها و سایر تجهیزات الکتریکی در اثر فقدان عایقبندی و یا
ضعف استقامت الکتریکی عایقها در مقابل فشارهای ضربهای دینامیکی و الکتریکی، ازدیاد بیش از حد مجاز درجه حرارت، خطاهای
پدید میآید که اغلب موجب قطع انرژی الکتریکی میگردد.
این خطاها ممکن است به صورت اتصال کوتاه، اتصال زمین، پارگی و قطع هادیها و خورد شدن و شکستن عایقها و … ظاهر شود.
در این صورت تجهیزی که چنین خطایی پیدا میکند باید بلافاصله از شبکهای که آن را تغذیه مینماید جدا شود؛ تا از گسترش خطا و
از کار افتادن قسمتهای سالم شبکه جلوگیری شود.
جلوگیری از بروز خطا و اتصالی در شبکه برق امری است محال و ممتنع، با این همه خواسته مصرفکننده برق، انتقال و توزیع بدون
وقفه برق است. به عبارت دیگر باید شبکه طوری طرح شود که از پایداری و ثبات قابل قبولی برخوردار باشد. امروزه قطع برق برای
مدت کوتاهی ممکن است باعث مختل شدن زندگی فردی و یا زیانهای جبرانناپذیر شود.
لذا جدا نمودن تجهيز از شبکه معیوب امری لازم است ولی کافی نیست بلکه باید تدابیری برای وصل مجدد در کوتاهترین زمان لازم
بکار برده شود.
تولید، انتقال، توزیع برق بدون وقفه بدون دخالت دستگاههای حفاظتی که به آنها رله (Relay) گفته میشود، ممکن نیست. وظیفه
رله این است که در موقع پیش آمدن خطر در محلی از شبکه برق متوجه آن شود، آن را بسنجد و دستگاههای خبری را آماده و آگاه
کند و در صورت لزوم راسا اقدام نماید و فقط قسمت معیوب را از شبکه جدا نماید و قسمتهای سالم مادامیکه خطری آنها را
تهدید نمینماید به کار خود ادامه دهند. این نوع حفاظت را محلی یا موضعی یا Selective میگویند. این مهم فقط به رله بستگی
ندارد بلکه به طرز توزیع و سیستم انتقال نیز وابسته است. در ادامه بحث، سیستم حفاظت با جزئیات بیشتری مورد بحث قرار گرفته است.
- هدف سیستم حفاظت:
بالا بردن قابلیت دسترسی (Availability)، اطمینان (Reliability) و امنیت (Safety) شبکه قدرت به طوری که بتواند ضمن کاهش
تعداد قطعیها و توقف ژنراتور و یا سایر تجهیزات مورد حفاظت، از صدمه به آنها در اثر شرایط مختلف کار جلوگیری به عمل آورد.
امنیت افراد و تجهیزات مورد حفاظت و کمینه نمودن صدمه به آنها
مشخصات یک سیستم حفاظت:
- سرعت (Speed)؛ به منظور کمینه نمودن صدمه به تجهیزات و کاهش مشکلات پایداری
- امنیت (Security)؛ عملکرد در زمان وقوع خطا و عدم عملکرد زمانیکه خطا وجود ندارد.
- قابلیت انتخاب (Selectivity)؛ حذف خطا با باز کردن حداقل کلیدها |
سیستم حفاظت باید بتواند در مقابل شرایط ذیل عمل حفاظت را انجام دهد:
- بهرهبرداری غلط
- بروز خطا
1-2-مهمترین تجهیزات مورد حفاظت
ماشینهای دوار: ژنراتور سنکرون و موتورهای سنکرون و آسنکرون
ماشینهای ساکن: ترانسها، باسداکت
 سیستم حفاظت شامل تمامی تجهیزاتی است که بتواند شرایط بروز خطا و یا بهرهبرداری نادرست را آشکار نموده و با توجه به شرایط
سیستم حفاظت شامل تمامی تجهیزاتی است که بتواند شرایط بروز خطا و یا بهرهبرداری نادرست را آشکار نموده و با توجه به شرایط
سیستم عکسالعمل لازم را در زمان مناسب به منظور حفاظت از افراد، تجهیزات و یا پایداری سیستم انجام دهد؛ این اجزا عبارتند از:
رلهها، کلیدها، ترانسهای مچینگ و…
ورودیها: مقادير عملیاتی ورودی توسط تجهیزات ذیل ممکن است برآورده شوند:
Current Transformers, Voltage Transformers, Transducers Binary Inputs (From Relays, Breaker Positions, D.C.S Or, …)
خروجیها: مقادير عملیاتی خروجی توسط تجهیزات ذیل ممکن است برآورده شوند:
Binary Outputs To Breakers, D.C.S Or Other Relays, Liquid Crystal Display, L.E.D’S, Recorders, …
اجزای سیستم حفاظت
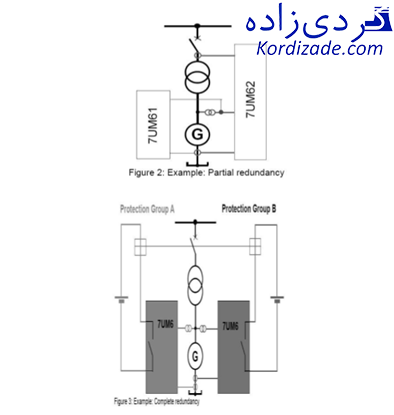
TYPICAL CONNECTIONS – REDUNDANCY CONCEPTS
اغلب برای افزایش قابلیت اطمینان و امنیت در یک شبکه از سیستم حفاظت به صورت Redundant استفاده میشود.
 اجزای سیستم حفاظت
اجزای سیستم حفاظت
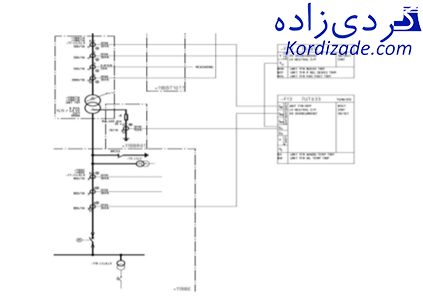
PROTECTION CABINET LAYOUT
پانل 11CHA11+ به عنوان حفاظت اصلی و پانل 11CHA12+ معمولاً به عنوان پشتیبان در نظر گرفته میشوند. برخی تجهیزاتی
که روی Front Panel مشاهده میشوند عبارتند از:
| حفاظت ژنراتور | F11,F21 |
| حفاظت ترانس اصلی | F12, F22 |
| حفاظت ترانس کمکی | F13, F23 |
| رله سنکرون | F31 |
| ژنراتور 20 هرتز جهت استاتور ارت فالت | U47 |
| فیلتر میانگذر جهت استاتور ارت فالت | U48 |
| روتور ارت فالت | U12 |
| مجموعه مقاومت جهت رله روتور ارت فالت | R02 |
در ادامه به شرح این اجزا خواهیم پرداخت.
انواع رلهها در SIPROTEC
- 7SA؛ حفاظت دیستانس
- 7SJ؛ حفاظت اضافه جریان
- 7SS؛ حفاظت باسبار
- 7UT؛ حفاظت ترانسفورماتور
- 7UM؛ حفاظت ژنراتور
- 7VK؛ سنکروچک و AUTO RECLOSER
- 7VE؛ سنکرون
- 7RW و 7RE؛ حفاظت ولتاژی
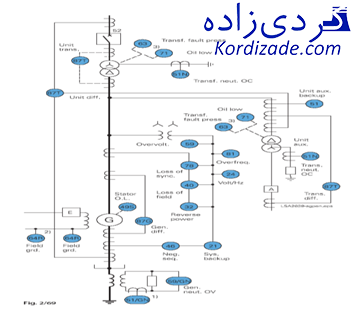
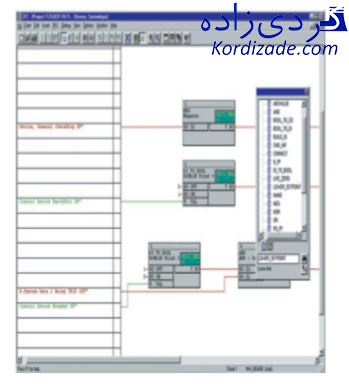
FUNCTION DIAGRAM
HMI: جهت ارتباط اپراتور رله استفاده میشود و به معنی Human Machine Interface میباشد.
C.F.C Chart: با استفاده از C.F.C میتوان از مشخصات سیستم جهت تهیه Logic به منظور ایجاد یک سیگنال حفاظت استفاده کرد.
Fault Recording: این بخش از رله وقایع را ثبت میکند. بسته به نیاز، قبل از پیکاپ یا قبل از تریپ و یا به صورت دستی فعال میشود.
Thermo Box Interface: ورودی R.T.D جهت مانیتور کردن درجه حرارت و حفاظت Thermal Over Load
Local/Remote Control: جهت انجام مانور باز و بسته کردن بریکر یا ارت سوئیچ و… از محل رله استفاده میشود.
Communication Module: جهت ارتباط بین رله و سختافزار دیگری از قبیل کامپیوتر، واحد سنکرون زمانی و … بکار میرود.
 HMI (1)
HMI (1)
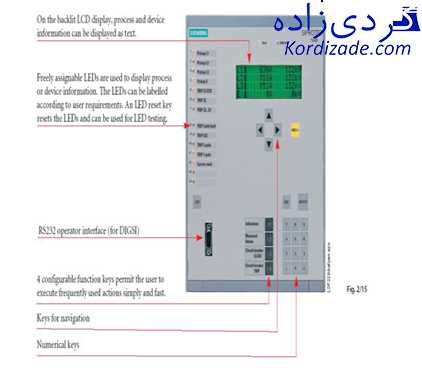
RELAY FRONT PANEL DESCRIPTION
FUNCTION DIAGRAM
HMI (2)
RELAY FRONT PANEL DESCRIPTION
FUNCTION DIAGRAM
LCD: به دو صورت Text Mode یا Graphic Mode موجود است و جهت نمایش اطلاعات در قالب متن کاربرد دارد.
با فشردن دکمه Menu میتوان پارامترهای ذیل را مشاهده کرد:
Settings, Annunciations (Alarms, Trips…), Measurements (Secondary, Primary, Percentage…), Binary Inputs, Binary Out Puts, L.E.D’s…
رلههای با L.C.D بزرگتر قابلیت نمایش میمیک دیاگرام به صورت گرافیکی را نیز دارند.
همچنین در این رلهها کلیدهای کنترل (Control Keys) جهت کنترل میمیک دیاگرام (کنترل مستقیم Station به عنوان مثال ارت
سوئیچ و…) اضافه شده است. ضمناً جهت Switch نمودن بین حالت Local/Remote و Test/Interlocking، دو کلید دیگر در
نظر گرفته شده است.
به جز در موارد فوق در سایر موارد تقریبا تمامی رلههای زیمنس شباهت زیادی دارند:
L.E.D: برای اطلاع از وضعیت Process Data و يا Device Information استفاده میشود. محفظه کنار آن جهت Label گذاری
میباشد. از دکمه L.E.D برای ریست کردن رله استفاده میشود.
Navigation Keys: جهت انتخاب پارامترهای L.C.D
Numerical Keys: جهت وارد نمودن مقادیر عددی و ستینگها و… استفاده میشود. جهت تایید عملیات از Enter استفاده
میشود.
Function Keys: کلیدهای قابل برنامهریزی جهت اجرای سریع یک فرمان و یا دسترسی سریع به اطلاعات به عنوان مثال اندازهگیری
مقادیر اولیه یا ثانویه یا آخرین فالت و…
Rs232/485 Port: جهت اتصال رله به کامپیوتر و استفاده از نرمافزار DIGSI جهت دسترسی بیشتر استفاده میشود.
اکثر رلههای زیمنس مجهز به Fault Memory هستند که مقادیر اندازهگیری شده لحظهای یا R.M.S را جهت ذخیره در یک رینگ
بافر Scan مینماید.
مقادیر لحظهای زیر، هر سیکل 16 مرتبه Scan میشوند و در صورت وقوع خطا در یک زمان قابل تنظیم و به مدت محدودی حدود
5 ثانیه قابل Record هستند:
| (Il1s1, Il2s1,il3s1,iEE1) | ||
| (Il1s2, Il2s2,il3s2,iEE2) | ||
| (Idiffi, Idiff2,Idiff3) | ||
| (Istab1, Istab2,Istab3) | ||
| (ULIE,UL2E,UL3E,UE) | ||
| در ترانسدیوسرهای ورودی | (U=OPI=) | |
مقادير RMS اندازهگیری شده عبارتند از:
I1, 12, IEE1, IEE2, U1, UE, P, Q, , f-fn, R And X
FAULT RECORD میتواند توسط یک BI (ورودی باینری) یا با PICK UP و یا تریپ استارت شود. به صورت دستی نیز میتوان آن را توسط نرمافزار Digsi جهت تست فعال کرد.
CONTINUES FUNCTION CHART (CFC)
به کمک ابزار گرافیکی C.F.C (Continues Function Chart) میتوان ترتیب کلیدزنی (switching Sequence) و طرح
اینترلاکها (Interlocking Schemes) را به راحتی در یک محیط گرافیکی و با سمبلهای منطقی (Logical Symbols) که قابل
Drag And Drop هستند پیادهسازی کرد. گیتهای منطقی نظیر FLIP-FLOP، TIMER، OR، AND نیز در دسترس هستند تا به
راحتی بتوان ارتباط بین سیگنالهای ورودی و خروجی را برقرار ساخت.
 ابزار گرافیکی
ابزار گرافیکی
C.F.C (Continues Function Chart)
TEMPERATURE MEASUREMENT VIA THERMO BOX OR RTD (RESISTANCE TEMPRATURE DETECTOR) BOX
حفاظت از سیمپیچیهای ترانس، یاتاقانهای ژنراتور و موتور، اهمیت کاهش هزینههای انتقال و توزیع انرژی و … باعث افزایش
اهمیت بحث Thermal monitoring شده است. برای این منظور بعضی از رلهها مجهز به Thermal interface هستند که قابلیت
اتصال سریال به Thermo-Box یا R.T.D-Box را دارند. اتصال حداکثر دو Box با 6 ورودی (حداکثر 12 ورودی) در یک زمان ممکن
است. نوع سنسورها (PT100, Ni100, Ni120) در هر ورودی قابل تعریف است. برای هر ورودی دو مرحله قابل تعیین است که
میتواند برای آلارم و تریپ استفاده شود. البته به عنوان راهحل دیگر مطابق IEC-60345 محاسبات انتقال حرارت و محاسبه درجه
حرارت سیمپیچیها ممکن است.

RTD (RESISTANCE TEMPRATURE DETECTOR) BOX
- حفاظت در ترانس واحد
7UT FUNCTION LIST
7SJ FUNCTION LIST
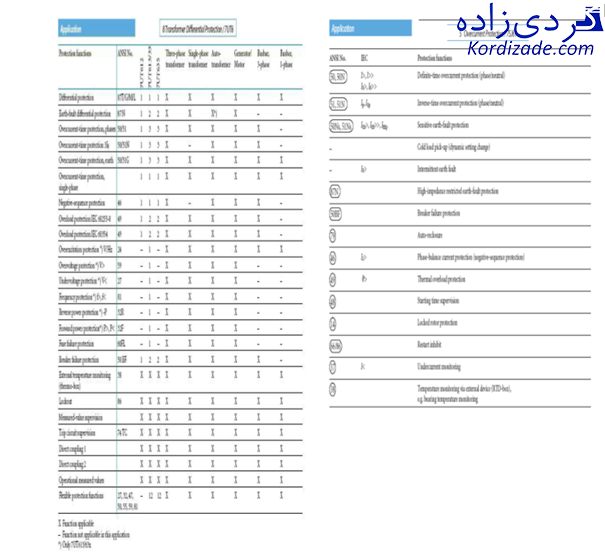 توابع حفاظتی زیر توسط رلههای 7SJ61/7UT6 ساپورت میشوند. توابع 50/51,51N,87 برای حفاظت ترانس واحد و توابع 60FL 50/51,51N,87,87N,24 برای حفاظت ترانس اصلی استفاده شده است.
توابع حفاظتی زیر توسط رلههای 7SJ61/7UT6 ساپورت میشوند. توابع 50/51,51N,87 برای حفاظت ترانس واحد و توابع 60FL 50/51,51N,87,87N,24 برای حفاظت ترانس اصلی استفاده شده است.
حفاظت اضافه جریان
هدف از این حفاظت
- حفاظت پشتیبان برای اتصال کوتاه در دستگاه مورد حفاظت
- حفاظت پشتیبان برای ارت فالت در شبکه زیردست (Down Stream) که ممکن است با تاخیر باز شوند.
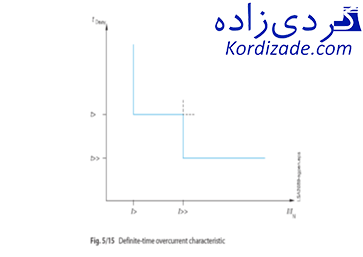
DIFINITE TIME OVER CURRENT PROTECTION 50/50N
2-1-1 جریان هر فاز و ارت به طور جداگانه مطابق شکل با I> یا IE> مقایسه میشوند. در صورت زیاد شدن جریان، Pickup یا رله
ظاهر میشود و در صورتی که زمان قابل تنظیم <t یا < سپری شود سیگنال تریپ ظاهر شده و به تریپ ماتریکس فرستاده میشود.
ضمنا در حفاظت ترانس تریپ با Inrush بلاک میشود (Inrush restraint feature).
2-1-2 برای مقادیر بالاتر جریان مرحله دوم این حفاظت مشابه مرحله اول، با جریان بیشتر و زمان کمتر فعال میشود.
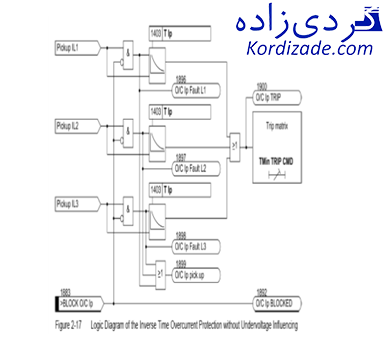
INVERSE TIME OVER CURRENT PROTECTION 50/50N
جریان هر فاز و ارت به طور جداگانه مطابق منحنی قابل انتخاب توسط رله بررسی شده در صورت رسیدن به مرز Ip، Pickup رله
ظاهر میشود و در صورتی که زمان t = f(I) سپری شود سیگنال تریپ ظاهر میشود.

2-3 DIFINITE TIME OVER CURRENT LOGIC DIAGRAM
1- جریان <I دارای یک مرحله under voltage seal-in نیز میباشد که میتوان آن را فعال یا غیرفعال کرد. در صورت افت ولتاژ
توالی مثبت بلافاصله پس از پیکآپ رله اضافه جریان، این رله باعث میشود پیکآپ برای یک مدت زمان قابل تنظیم فعال بماند،
حتی اگر جریان از حد پیکآپ پایینتر بیاید.
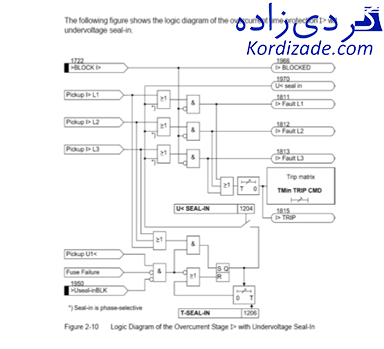 2-3-1 اگر ولتاژ قبل از سپری شدن زمان Seal-in بهبود یافته و یا توسط یک ورودی باینری بلاک شود (مثلاً پس از تریپ MCB
2-3-1 اگر ولتاژ قبل از سپری شدن زمان Seal-in بهبود یافته و یا توسط یک ورودی باینری بلاک شود (مثلاً پس از تریپ MCB
مربوط به حفاظت) یا در صورتی که ماشین متوقف شود؛ بلافاصله رله Drop out میشود.
2-4 INVERSE TIME OVER CURRENT LOGIC DIAGRAM
 هدف از این حفاظت
هدف از این حفاظت
2-4-1 حفاظت گزینشی سرعت بالا جهت ایزوله کردن اتصال کوتاههای داخلی ژنراتور، موتور و ترانسفورماتور
3- حفاظت در ترانس اصلی
 شکل 3-1
شکل 3-1
حفاظتهای ترانس اصلی
 شکل 3-1
شکل 3-1
هدف از این حفاظت:
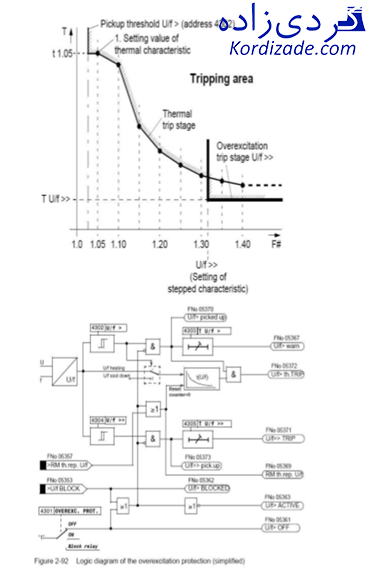
3-1-1 آشکارسازی افزایش شار مغناطیسی در هسته که باعث تسریع در اشباع و درنتیجه افزایش تلفات هیسترزیس میشود.
تلفات هیسترزیس
این حفاظت دارای دو تابع زمان معکوس و زمان مشخص است. معمولا مرحله اول تابع زمان مشخص (<U/F) آلارم
(Alarm Stage)، مرحله دوم (<<U/F)، تریپ (Trip Stage) و تابع معکوس مرحله حرارتی (Thermal Stage) است.
2- OVER EXCITATION
3-2-1 ALARM & TRIP CHARACTRISTIC LOGIC DIAGRAM
 شکل 3-2-1
شکل 3-2-1
3-3 OVER EXCITATION-ANSI24
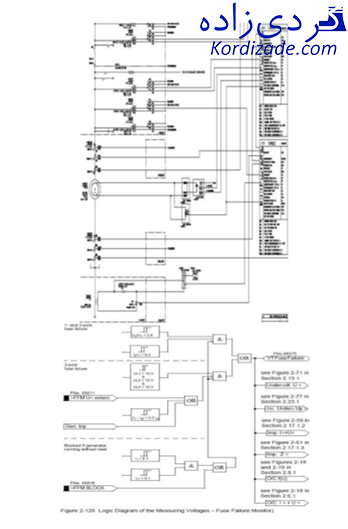
3-3-1 FUSE FAILURE MONITORING
جهت جلوگیری از عملکرد ناخواسته حفاظتهای ولتاژی به هنگام بروز اشکال در مدار اندازهگیری ولتاژ
 شکل 3-3-1
شکل 3-3-1
- حفاظت در ژنراتور
4-1 حفاظتهای ژنراتور
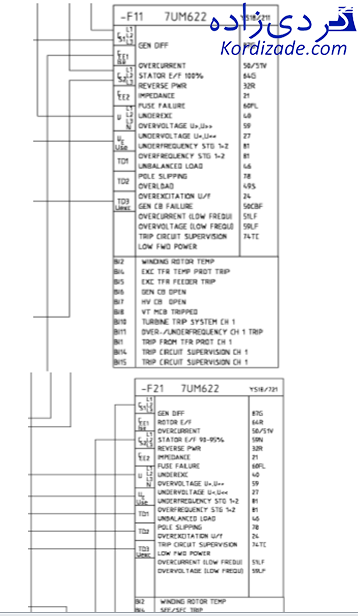 شکل 4-1
شکل 4-1
هدف از این حفاظت:
آشکارسازی اتصالی زمین در سیمپیچی استاتور ژنراتور که از طریق ترانس اصلی به شبکه وصل است.
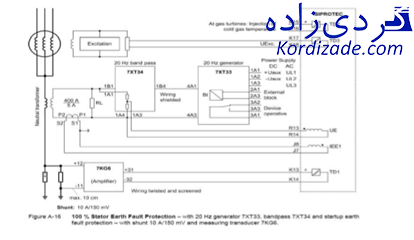
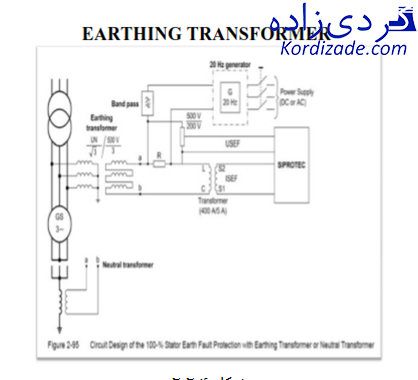
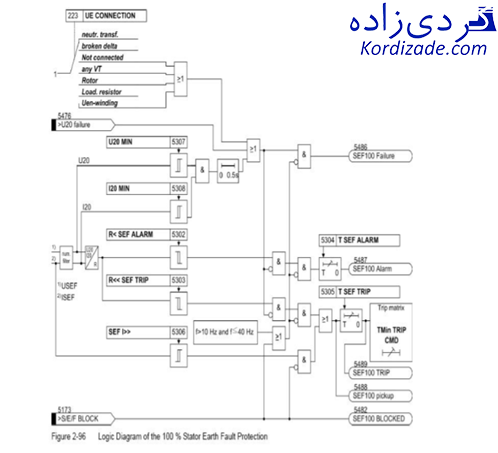
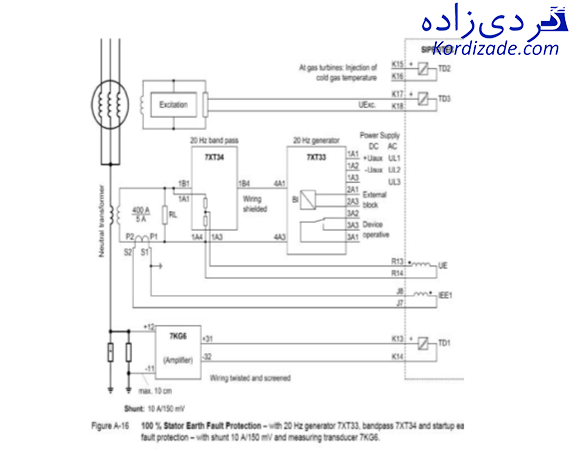
الف) حفاظت استاتور ارت فالت 100%
100 % Stator Earth Fault Protection With 20 Hz Voltage Injection (ANSI 64 G–100 %)
 شکل 4-2
شکل 4-2
(NUTRAL GROUNDING TRANSFORMER)
NGT
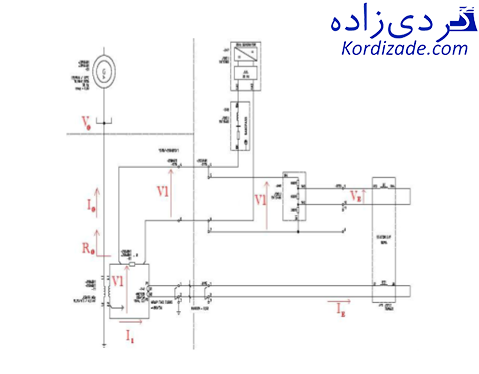
SEF100%-COMPONENTS
شرح تابع
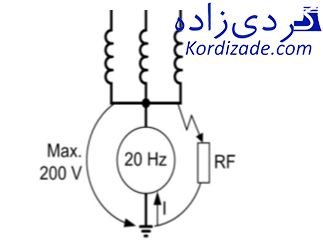
ولتاژ AC فرکانس پایین (20 هرتز) با دامنه 1% ولتاژ ژنراتور به نقطه ستاره به منظور محاسبات امپدانس خطا تزریق میشود.
در صورت بروز خطا در نقطه ستاره، جریان برگشتی و نتیجتا امپدانس توسط رله اندازهگیری میشود.
 شکل 4-2-2
شکل 4-2-2
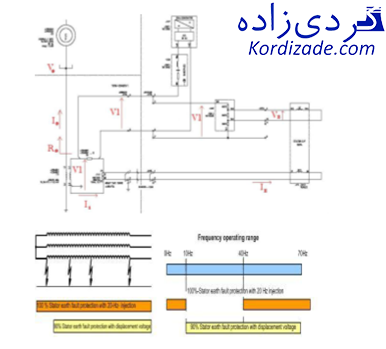
هدف از استفاده از 20 هرتز ژنراتور
- 4-2-2-1 حفاظت ژنراتور حتی در زمان Stand Steal
- 4-2-2-2 مستقل کردن حفاظت از فرکانس شبکه و ولتاژ جابجایی
در عمل تزریق ولتاژ 20 هرتز به دو طریق ممکن است:
- 4-2-2-3 استفاده از Earthing Transformer
- 4-2-2-4 استفاده از Neutral Transformer
 شکل 4-2-2
شکل 4-2-2
 شکل 4-2-3
شکل 4-2-3
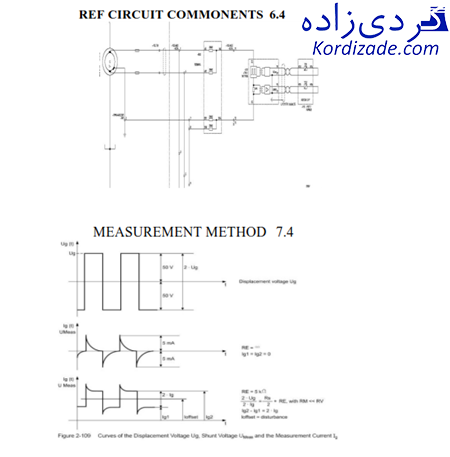
حفاظت SEF دارای دو مرحله مجزا است:
- مرحله امپدانسی: در این روش امپدانس معادل تونن خطا از دید نقطه صفر ژنراتور توسط رله اندازهگیری شده و با مقادیر مشخصی مقایسه و تصمیمگیری میشود. این مقادیر شامل آلارم و تریپ میشوند. این حفاظت تمام سیمپیچ استاتور را حفاظت مینماید.
- مرحله جریانی: در این روش فقط جریان نقطه صفر اندازهگیری شده و با مقدار مشخصی مقایسه میشود. این مرحله نمیتواند از تمام طول سیمپیچی استاتور ژنراتور حفاظت نماید ولی این امکان وجود دارد که از 0 تا 95 درصد از سیمپیچ استاتور را محافظت نماید. معمولا طوری تنظیم میشود که با استاتور ارت فالت 90٪ Pick up مینماید.
1) نحوه محاسبه امپدانس خطا R0 توسط رله:
 شکل مرحله امپدانسی
شکل مرحله امپدانسی
مقادیر RO آستانه آلارم و تریپ:
 شکل آستانه آلارم
شکل آستانه آلارم
2) مرحله جریانی:
 شکل جریانی
شکل جریانی
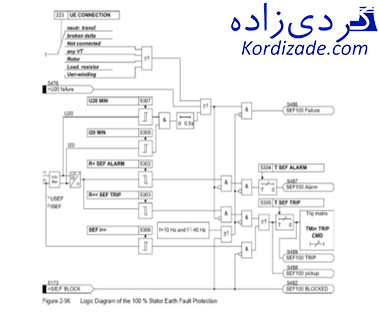
4-4 LOGIC DIAGRAM
 شکل 4-4 SEF 100%-TRIP MATRIX
شکل 4-4 SEF 100%-TRIP MATRIX
هدف از این حفاظت:
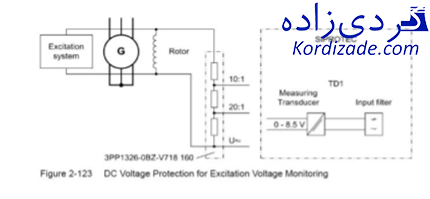
4-4-1 مانیتور کردن ولتاژ DC سیستم تحریک
4-4-2 حفاظت از بروز اتصالی زمین در مدار DC سیستم SFC
ب) حفاظت DC
DC Voltage/Current Protection (ANSI 59 N DC/51 N DC)
 شکل 4-4-2
شکل 4-4-2
DC PROTECTION-COMPONENTS
- مانیتور کردن ولتاژ تحریک
 آشکارسازی اتصال کوتاه در مدار DC سیستم SFC
آشکارسازی اتصال کوتاه در مدار DC سیستم SFC
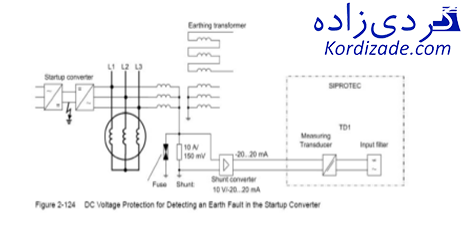 آستانه IDC جهت تحریک رله:
آستانه IDC جهت تحریک رله:
هدف از این حفاظت:
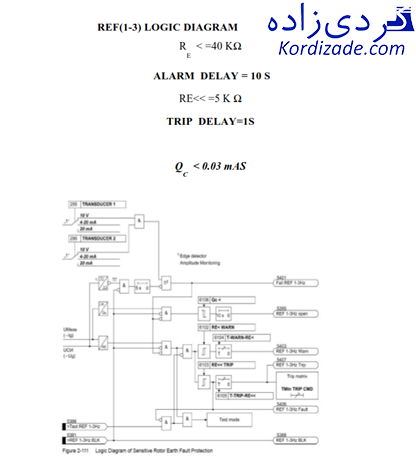
5-4-1 آشکارسازی خطای ارت فالت در مدار تحریک ژنراتور سنکرون از طریق اندازهگیری امپدانس خطا
ج) روتور ارت فالت
Sensitive Rotor Earth fault Protection With 1-3 Hz Square Wave Voltage Injection (ANSI 64R-1 to 3 Hz)
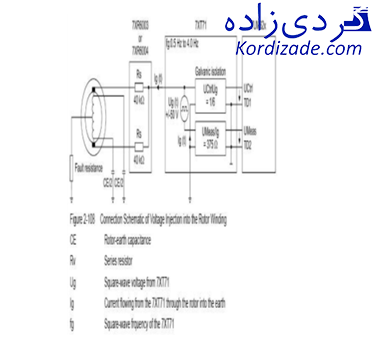
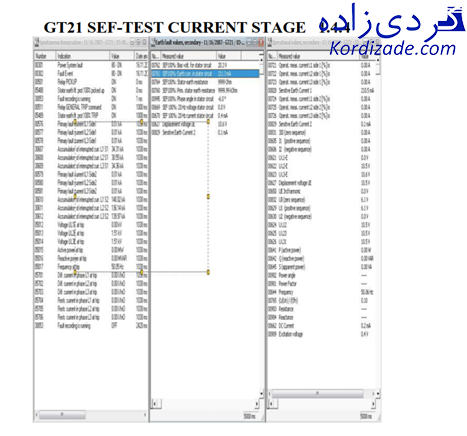
 نمونه زیر مقادیر TD1 (ولتاژ تزریقی به روتور) و TD2 (جریان خطا اندازهگیری شده) را در ژنراتور واحد 1 نیروگاه فردوسی نشان
نمونه زیر مقادیر TD1 (ولتاژ تزریقی به روتور) و TD2 (جریان خطا اندازهگیری شده) را در ژنراتور واحد 1 نیروگاه فردوسی نشان
میدهد. فرکانس تزریقشده 1.4HZ است. جریان خازنی روتور نیز قابل مشاهده است.
 شکل 4-7
شکل 4-7
هدف از این حفاظت:
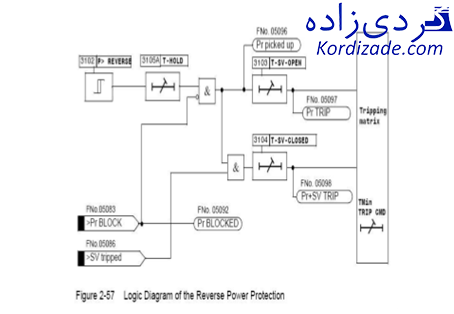
4-7-1 جلوگیری از اعمال توان شبکه به توربین که در پی موتور شدن ژنراتور صورت میگیرد.این توان باعث OVER HEAT شدن
پرههای توربین میشود. برای این منظور معدل حداقل 16 سیکل از مولفه توالی مثبت ولتاژ و جریان جهت محاسبه توان اکتیو مورد
ارزیابی قرار میگیرد.
حفاظت
4-8 REVERSE POWR-ANSI 32R
REVERSE POWER-ANSI 32R LOGIC
 شکل 4-8
شکل 4-8
هدف از این حفاظت:
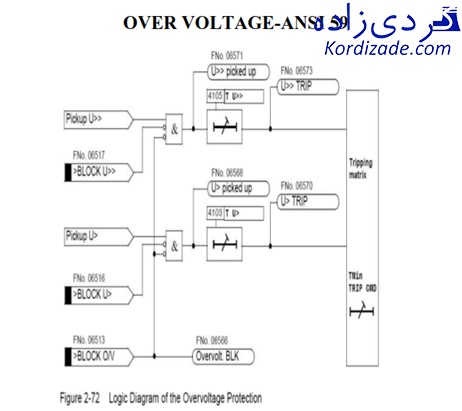
4-8 حفاظت ماشین و تجهیزات شبکه متصل به آن از اثرات مخرب اضافه ولتاژ، که در اثر عملکرد نادرست سیستم تحریک در حالت
MANUAL عملکرد ناقص سیستم AVR، کاهش بارهای ژنراتور و یا جدا شدن ژنراتور از شبکه و جزیرهای شدن سیستم حادث میشود.
4-9 حفاظت
OVER VOLTAGE-ANSI 59
شکل 4-9
هدف از این حفاظت:
4-9 آشکارسازی و گزارش کاهش ولتاژ شبکه که ممکن است در اثر شرایط ناپایدار شبکه حادث شود.
4-10 حفاظت
UNDER VOLTAGE-ANSI27
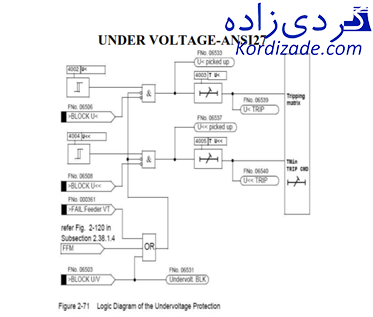 شکل 4-10
شکل 4-10
هدف از این حفاظت:
4-10 آشکارسازی فرکانسهای خیلی پایین یا خیلی بالا و حفاظت ماشین و شبکه از آثار مخرب آن
4-11 حفاظت فرکانس
FERQUENCY PROTECTION-ANSI81
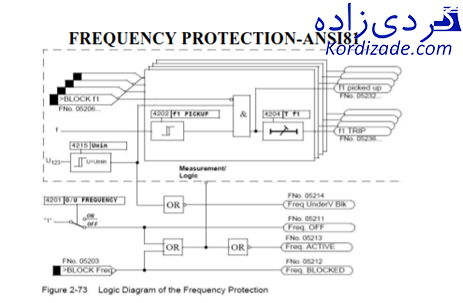 شکل 4-11
شکل 4-11
هدف از این حفاظت:
آشکارسازی و حفاظت روتور از جریانهای نامتعادلی که به دلیل ایجاد فرکانس دوبل پاد ساعتگرد باعث افزایش جریانهای ادی
و افزایش درجه حرارت روتور و Over Heat شدن سیمپیچ Damper میشوند. این حفاظت ممکن است جهت آشکارسازی وقفهها یا
خطاها و یا مشکلات پلاریته ترانسهای جریان نیز استفاده شود. همچنین این حفاظت برای آشکارسازی خطاهای تکفاز و دو فاز با
دامنه پایینتر از جریان بار نیز مفید است
 4-12
4-12
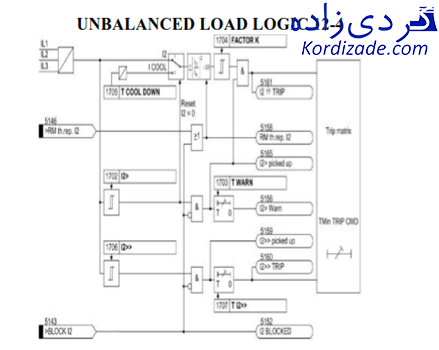
UNBALANCED LOAD
(NEGATIVSEQUENCE) PROTECTION
ANSI46
شرح تابع
حفاظت Unbalanced Load Protection با بکار بردن یک فیلتر عددی مولفهها، جریان توالی منفی ژنراتور را به دست میآورد.
این حفاظت دارای دو مرحله حرارتی زمان معکوس و جریانی زمان مشخص میباشد.
4-11-1 در مرحله حرارتی با توجه به دستورالعمل سازنده، مطابق فرمول زیر طولانیترین زمان ممکن برای تأخیر در تریپ بر اساس جریان توالی منفی حدس زده میشود.
4-11-2 در مرحله زمان مشخص اگر دامنه جریان توالی منفی از <I2 بیشتر شود، آلارم و در صورت آشکار شدن جریان خیلی زیاد <<I2 تریپ به تریپ ماتریکس فرستاده میشود.
4-11-3 یک زمان قابل تنظیم به منظور Cool Down به محض افت جریان <I2 شروع میشود که تابع ساختار روتور به خصوص
سیمپیچی دمپر است. این پارامتر بهعنوان زمان مورد نیاز برای کاهش دمای محاسبه شده روتور از 100% تا 0% تعریف شده و اگر در
طول این زمان مجددا عدم تعادل جریان اتفاق افتد، مشخصه حرارتی رله حفاظتی در زمان کمتری تریپ خواهد کرد.
شکل 4-12
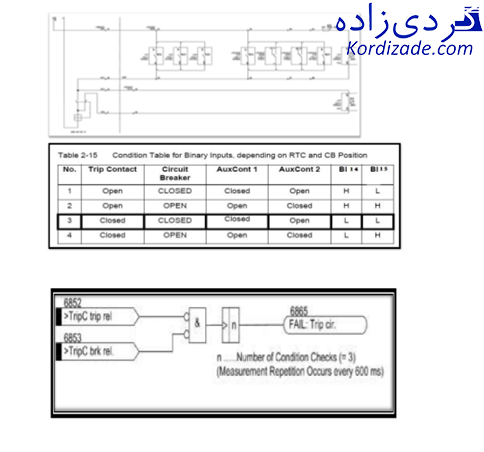
اساس حفاظت TCS با دو BI
هدف از این حفاظت
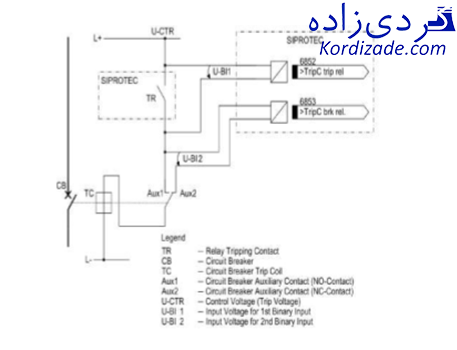 ا-مانیتورینگ مدار حفاظت، که با یک یا دو ورودی باینری (BI) قابل انجام است. این روش یعنی استفاده از ورودیهای باینری پاسخ
ا-مانیتورینگ مدار حفاظت، که با یک یا دو ورودی باینری (BI) قابل انجام است. این روش یعنی استفاده از ورودیهای باینری پاسخ
بریکر را نیز میتواند با استفاده از وضعیت کنتاکت کمکی مانیتور نماید. در صورتی که از دو B1 استفاده شود مدار تریپ مطابق شکل
مقابل بسته میشود. در این حالت یکی از BIها با کنتاکت تریپ و دیگری با کنتاکت بریکر موازی میشود.
2-مطابق شکل فقط در صورت که تریپ و عدم عملکرد بریکر داشته باشیم، یا مدار تریپ باز شود، هر دو ورودی Low میشود
 4-13
4-13
TRIP CIRCULIT SUPPERVISION ANSI74TC
CBF
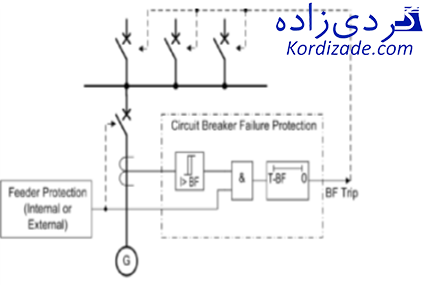
هدف از این حفاظت
CIRCUIT BREAKER FALURE CBF
ANSI50BF
حفاظت از مدارات و تجهیزات تحت حفاظت، در صورت عدم عملکرد مدار شکن یا مدار تریپ پس از وقوع خطا و عملکرد رله حفاظتی.
دو مورد ذیل میتوانند معیار عملکرد CBF شوند:
4-13-1 چک کردن اینکه پس از یک تریپ، جریان سهفاز از حد مشخصی کمتر شده است یا نه
4-13-2 چک کردن وضعیت کنتاکت کمکی بریکر در صورتی که معیار جریان در دسترس نباشد.
معمولا دو معیار فوق با هم Or میشوند. در صورتی که عملکرد رله به دلایل جریانی نباشد، مثلا حفاظت اضافه ولتاژ در جریانهای
کمتر از آستانه قابل تعریف برای این تابع، معیار جریانی معیار مناسبی نیست.
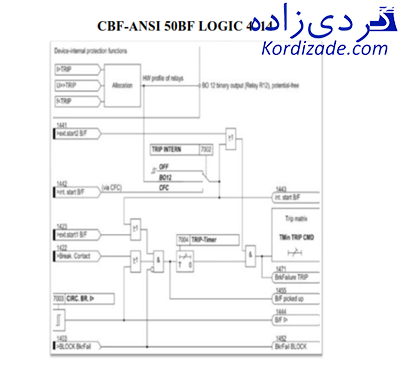
 این حفاظت به دو طریق میتواند راهاندازی (Initiate) شود:
این حفاظت به دو طریق میتواند راهاندازی (Initiate) شود:
1 عملکرد یکی از حفاظتهای داخلی رله مانند عملکرد توابع حفاظتی و یا از طریق CFC
2 حفاظت خارجی مانند فعال شدن ورودی باینری
 شکل 4-14
شکل 4-14
UNDER EXCITATION PROTECTION-ANSI40
هدف از این حفاظت:
حفاظت یک ماشین سنکرون از عملکرد آسنکرون و ناپایدار که ممکن است به دلایل زیر حادث شود:
- 4-14-1 اتصال کوتاه یا اتصال باز در مدار تحریک
- 4-14-2 عملکرد نادرست سیستم AVR
- 4-14-3 کنترل نادرست ژنراتورها و ترانسها
- 4-14-4 اتصال ژنراتور به شبکه به صورت خازنی
برای تشخیص Under Excitation رله جریانها و ولتاژهای سه¬فاز استاتور و نیز ولتاژ تحریک را که توسط ترانسدیوسر TD3 در
دسترس قرار میگیرد، پردازش میکند.
استاتور از روی ولتاژ و جریان سه¬فاز توالی مثبت اندازهگیری میشود. همانطور که در ادامه بحث آمده است، همیشه با اندازهگیری
ادمیتانس محدوده پایداری فیزیکی مناسبی که مستقل از ولتاژ نامی است به دست میآید که با مشخصه پایداری منحنی قابلیت
ماشین به شکل کاملاً مطلوبی مطابقت دارد.
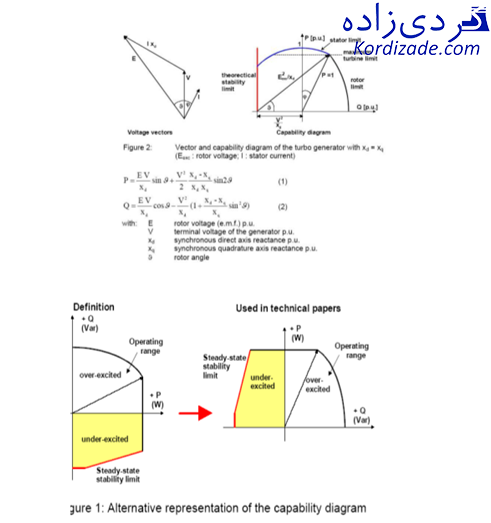 GENERATOR CAPABILITY CURVE 15-4
GENERATOR CAPABILITY CURVE 15-4
شکل 15
مطابق دستگاه مختصات دکارتی، ربع اول رنج بهرهبرداری (P>0, Q>0) را برای ژنراتور مشخص مینماید. در حالت وقوع
Under Excitation بهرهبرداری در ربع چهارم است (P>0, Q<0).
اغلب دیاگرام نسبت به محور Q قرینه میشود (Mirror) و سپس 90 درجه ساعتگرد میچرخد. این تغییر در ادامه بحث لحاظ شده
است.
حد پایداری ایستای ژنراتور از معادلات توان اکتیو و راکتیو ژنراتور نتیجهگیری میشود. در شکل روبرو در حالت Xd=Xq=Xs معادلات
توان برای توربوژنراتور به دست میآید.
حد زاویه روتور (حد پایداری تئوری) °90= است که در شکل 2 نشان داده شده است. این مقدار در عمل کمتر از 90 درجه در نظر
گرفته میشود. همچنین با در نظر گرفتن محدودیتهای توربین، جریانهای روتور و استاتور به این نتایج میرسیم:
ا در حالت Over Excited: پایداری به محدودیت توان توربین و جریان روتور محدود میشود؛
2 در حالت Under Excited: پایداری به محدودیت توان توربین و جریان استاتور و نیز محدودیت زاویه روتور محدود میشود؛
4-16 حد پایداری تئوری دینامیکی (گذرا)
 شکل 4-16
شکل 4-16
تمامی آنچه تاکنون مورد بحث قرار گرفت زمانی صدق میکند که وضعیت سیستم تحت تأثیر تغییرات کوچک باشد. ولی هنگامیکه
یک تغییر ناگهانی در بار یا سایر شرایط سیستم رخ دهد، شرایط گذرا به وجود میآید که پاسخ گذرای سیستم را به دنبال خواهد
داشت. بنابراین یک حد پایداری دینامیکی نیز وجود خواهد داشت که بایستی مورد بررسی قرار گیرد. به سادگی با قرار دادن مقادیر
( ) در معادلات توان (1) و (2) میتوان حد تئوری پایداری دینامیکی را به دست آورد.مشابه آنچه در مورد حد پایداری تئوری گفته شد،
در این مورد پایداری دینامیکی با راکتانس گذرای سنکرون یا مشخص میشود. در عمل این محدودیت برای زاویه روتور میتواند
زوایای بالاتر از 90 درجه نیز باشد و بین 110 با 120 درجه تغییر نماید.
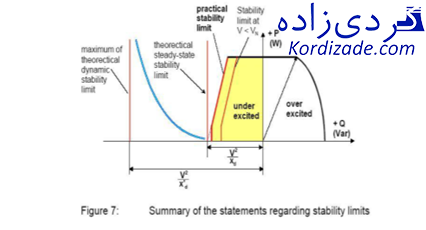
پس به طور خلاصه:
- پایداری عملی حالت دائمی در سمت راست مقدار پایداری تئوری است که در نمودار P-Q به ولتاژ واقعی ماشین وابسته است و هر چه ولتاژ کم شود منحنی به سمت راست منتقل میشود معمولا در ولتاژ نامی مورد بحث قرار میگیرد.
- به منظور پایداری دینامیکی یک حد پایداری دینامیکی در نظر گرفته شده تا در صورت تا در حالات زیر تحریک شدید بلافاصله ماشین از شبکه جدا شود
شکل 4-16
در دستگاه P-Q در حالت زیر تحریک پایداری عملی تابع ولتاژ واقعی ماشین نیز هست و هر چه ولتاژ کمتر شود، مشخصه به سمت راست حرکت میکند. برای مستقل کردن مشخصه از ولتاژ واقعی ماشین، با توجه به روابط زیر میتوان نوشت:
با توجه به روابط فوق به راحتی نگاشت منحنی قابلیت ژنراتور در صفحه ادمیتانس نتیجه میشود که مستقل از ولتاژ است و در ادامه بحث مورد استفاده قرار میگیرد. الگوریتم اندازهگیری سیستم حفاظت بر دو فرمول فوق بنا شده است. پس از اندازهگیری جریان سهفاز لحظهای، ولتاژ لحظهای بین فاز و زمین ژنراتور، مؤلفههای توالی مثبت ولتاژ و جریان محاسبه شده و مطابق فرمولهای فوق برای محاسبه توان اکتیو و راکتیو مورد استفاده قرار میگیرند. سپس مقادیر توان بر مقدار توان دوم توالی مثبت ولتاژ تقسیم میشود. مقادیر به دست آمده مطابق شکل در دستگاه G-B اساس کار حفاظت Under Excitation است.
4-17 CHARACTERISTIC CURVE
شکل 4-17
برای مانیتور کردن حد پایداری حالت دائمی و گذرا که توسط تابع حفاظت Under Excitation انجام شده است معمولا مشخصات نشان داده شده در شکل فوق که از منحنی قابلیت ژنراتور منتج شده است کافی است. برای مقادیر سمت چپ مشخصه 3 احتمال پایداری سیستم خیلی پایین است. بنابراین تریپ خیلی سریع باید در دستور کار رله قرار گیرد. این حالت با آنچه که در پایداری استاتیک اتفاق میافتد خیلی متفاوت است زیرا در این حالت در صورتی که ولتاژ تحریک به اندازه کافی بالا باشد پایدار شدن مجدد متصور است. بنابراین مانیتور کردن ولتاژ تحریک (Uexc <) نیز لازم است. این ولتاژ برای کنترل زمان تریپ مشخصه 1 و 2 لازم است. زیرا با این روش از عملکرد غلط تابع (Over function) که ناشی از حالات گذرای دینامیک هستند – و نهایتا به پایداری میانجامند – جلوگیری میشود.
4-18 UNDER EXCITATION LOGIC
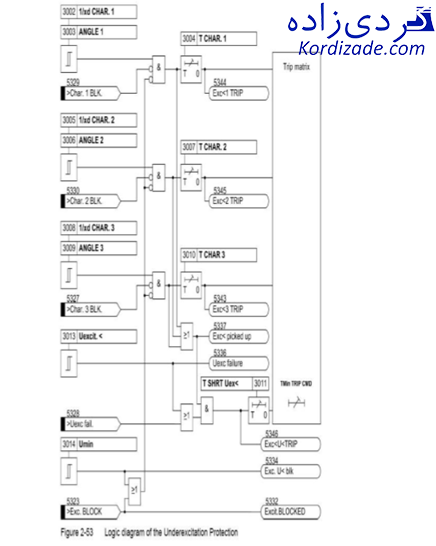 شکل 4-18
شکل 4-18
بنابراین به طور خلاصه:
4-18-1 اگر نقطه کار خارج از مشخصه 1 و 2 قرار گیرد و ولتاژ تحریک پیکآپ ننماید، از آنجا که برای این حالت پایداری مجدد متصور است، این حالت باید آلارم دهد و در صورت تنظیم زمان تریپ که حدودا 10 ثانیه در نظر گرفته میشود، تریپ خواهد کرد.
4-18-2 اگر نقطه کار خارج از مشخصه 1 و 2 قرار گیرد و ولتاژ تحریک پیکآپ نماید، برای این حالت تریپ سریع پس از 5/0 تا 1 ثانیه لازم است.
4-18-3 خروج از مشخصه 3 تریپ سریع کمتر از 3/0 ثانیه لازم دارد.
تریپ فوق به تریپ ماتریکس فرستاده میشود تا با باز کردن GCB، تحریک و نهایتا فعال نمودن سیگنال Shut Down خطا کاملا حذف گردد.
هدف از این حفاظت
حفاظت گزینشی (Selective) با قابلیت تأخیر زمانی (Time Graded) که از ماشین سنکرون، باسداکت و ترانسها در مقابل اتصال کوتاه محافظت مینماید؛ لذا به عنوان حفاظت پشتیبان اصلی یک نیروگاه یا تجهیزاتی که به طور سری متصل شدهاند مانند ژنراتور، ترانس، باسداکت و … مورد استفاده است.
IMPEDANCE PROTECTION ANSI 21
4-19 حفاظت امپدانس
شرح حفاظت امپدانس
شکل 4-19
4-19-1 جهت تشخص وضعیت فالت در شبکه و راهاندازی روشهای لازم جهت گزینش صحیح خطا، لازم است رله 7um62 پیکآپ نماید.
پس از pickup:
4-19-2 تایمر زمانی t3، که مرحله نهایی امپدانس است و در ادامه شرح داده میشود، فعال میشود.
4- 19-3 فازی که در آن خطا رخ داده است، مشخص میشود.
4-19-4 رله امپدانس شروع به محاسبه امپدانس مینماید.
4-19-5 فرمان تریپ فعال میشود.
4-19-6 فاز(های) معیوب نمایش داده میشود.
4-19-7 پیکآپ رله با اضافه جریان فعال میشود که البته میتواند با در نظر گرفتن کاهش ولتاژ (Under Voltage Seal-in) تکمیلتر شود. پس از عبور جریان از یک فیلتر عددی، مانیتور میشود تا در صورت عبور از یک حد مشخص خروجی پیکآپ فعال شود. این سیگنال وقتی جریان به 95٪ خودش که برسد خاموش میشود مگر اینکه Under voltage Seal – in فعال شده باشد.
4-19-8 هنگامیکه سیستم تحریک ژنراتور از شبکه تغذیه مینماید، ولتاژ تحریک ممکن است با یک اتصالی افت نماید. نتیجتا جریان خطا نیز با وجود خطا، افت خواهد کرد. در چنین مواردی پیک¬آپ رله فعال مانده با ولتاژ کنترل میشود و با در نظر قرار دادن ولتاژ توالی مثبت، تا یک بازه زمانی مشخص یا تا زمانی که ولتاژ به 105٪ مقدار تعیین شده خود برسد غیرفعال نمیشود.
شرح حفاظت امپدانس
تعیین امپدانس خطا:
برای محاسبه امپدانس فقط بایستی ولتاژها و جریانهای فازهای معیوب بکار گرفته شوند بنابراین پس از پیک¬آپ رله، ابتدا لوپی که خطا در آن اتفاق افتاده است مشخص میشود.
شرح حفاظت امپدانس
مشخصه
مشخصه تریپ رله امپدانسی یک چندضلعی متقارن است، اگرچه وقوع یک خطا در جهت معکوس (R and/or X<0) با فرم معمول
اتصال ترانسهای جریان در نقطه ستاره ژنراتور ممکن نیست. مشخصه با مقدار Z کاملا مشخص میشود.
- به محض مشاهده پیکآپ رله امپدانس پیوسته به محاسبه امپدانس منتج از ولتاژ و جریان لوپ انتخاب شده میپردازد. چنانچه امپدانس محاسبه شده در محدوده باشد، رله سیگنال تریپ را که ممکن است تاخیر نیز داشته باشد، صادر خواهد کرد.
- از آنجا که این رله چند مرحله ایست، ناحيه حفاظتی میتواند به گونهای انتخاب شود که مرحله اول آن (Z1, T-Z1) خطاهای محدوده ژنراتور و سمت فشار ضعیف ترانس اصلی و فشار قوی ترانس کمکی را پوشش دهد در حالیکه (Z2, T-Z2) شبکه را پوشش میدهد.
- بسته به شرایط کلیدزنی سیستم ممکن است در پارهای از موارد توسعه مرحله Z1 مفید باشد
شرح حفاظت امپدانس
بر اثر اتفاقات دینامیکی شبکه نظیر تغییر بار ناگهانی، اتصال کوتاه، Automatic Reclosure و عملیات کلیدزنی در طول
شبکه ممکن است نوسان توان رخ دهد. ثابت میشود در اثر نوسان توان امپدانس شبکه ممکن است کاهش یابد و اگر رله
امپدانس به موقع بلاک نشود باعث عملکرد کاذب آن گردد.
از آنجا که نوسانات توان سهفاز و متقارن هستند اولین پیشنیاز برای بلاک کردن تابع در زمان کاهش امپدانس، تقارن جریان
توالی منفی است. این بدان معنی است که خطاهای امپدانسی تکفاز نمیتوانند باعث بلاک شدن رله گردند.
همچنین در صورت پیکآپ نوسان توان اگر مجددا خطایی رخ دهد، که باعث افزایش جریان توالی منفی گردد، امپدانس را
مجددا اکتیو خواهد کرد.
از آنجا که تغییرات امپدانس در طول نوسان توان خیلی کندتر از زمانی است که اتصالی رخ داده است، لذا میتواند به عنوان
معیار مناسبی جهت تشخیص نوسان توان بکار برده شود. این امپدانس به دلیل طبیعت متقارن این حالت، از روی مؤلفه
توالی مثبت جریان و ولتاژ محاسبه میگردد.
OUT OF STEP PROTECTION–ANSI78
هدف از این حفاظت
بسته به شرایط شبکه و ژنراتورهایی که آن را تغذیه میکنند، پیشامدهای دینامیکی نظیر تغییرات سریع بار (Load jumps)، اتصال
کوتاههایی که دیر قطع میشوند و Auto-Reclosure یا عملیات کلیدزنی ممکن است باعث نوسان شبکه شوند. بعضی از این
نوسانات توان میتوانند پایداری شبکه را به مخاطره بیندازند. اغلب مشکلات پایداری نتیجه نوسانات توان اکتیو هستند که میتوانند
باعث Pole-Slipping و اضافه بار شدن ژنراتور گردند. در چنین شرایطی ژنراتور توسط حفاظت Out of step از شبکه جدا میگردد.
4-20 شرح حفاظت OUT OF STEP
- این حفاظت بر اساس اندازهگیری مطمئن امپدانس مختلط و بررسی خط سیر بردار آن بنا شده است. امپدانس بر اساس مولفههای توالی مثبت ولتاژ و جریان اندازهگیری میشود. بسته به اینکه خط سیر بردار امپدانس در چه وضعیتی است و مرکز الکتریکی نوسان کجاست رله تصمیمگیری خواهد کرد.
- Out Of Step در مدل ساده شکل روبرو توضیح داده شده است. در این شکل Ug ولتاژ ژنراتور و Un ولتاژ شبکه است. ژنراتور، ترانس و خط انتقال در بین این دو ولتاژ واقع شده است و جمع تمامی امپدانسها Ztot است. اگر محل اندازهگیری m باشد در این صورت امپدانس نقطه اندازهگیری از رابطه روبرو به دست میآید. در این رابطه زاویه بین ژنراتور و ولتاژ شبکه هم ارزان است. در شرایط نرمال این زاویه به بار بستگی دارد و در بازه طولانی ثابت است ولی در صورت وقوع Out Of Step این زاویه بهطور پیوسته نوسان کرده و در بازه 0 تا 360 درجه تغییر خواهد کرد.
شرح حفاظت OUT OF STEP
شکل زیر مسیر حرکت بردار امپدانس را مطابق فرمول فوق نشان میدهد که در آن اندازهگیری در m انجام شده است. به راحتی
ثابت میشود وقتیکه نسبت ولتاژ شبکه به ژنراتور ثابت است و زاویه بار تغییر نماید، اماکن هندسی انتهای بردار امپدانس دوایری
خواهند بود که مرکز تمامی آنها بر روی خطی هستند که با زاویه Ztot مشخص میگردند. ماکسیمم و مینیمم دامنه امپدانس
اندازهگیری شده به ازای 0= و 180= به دست میآید و اگر اندازهگیری در مرکز الکتریکی انجام شود به ازای 180= امپدانس
اندازهگیری شده صفر خواهد بود.
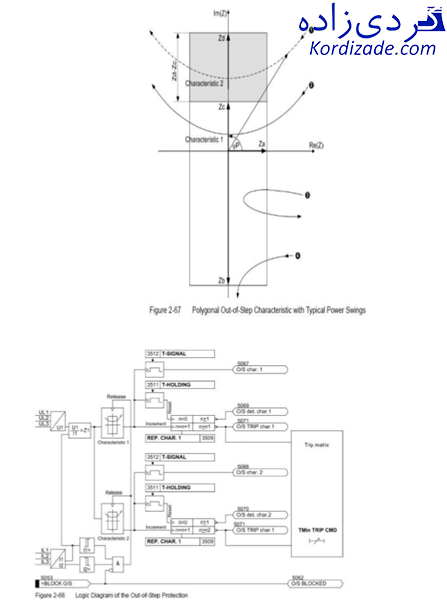
شرح حفاظت OUT OF STEP
شکل زیر مشخصه نوسان توان را با جزئیات بیشتری نشان میدهد. برای سادگی بیشتر فرض شده است زاویه Ztot یا 90= . مقادير
Zd-Zc، Zc، Zb، Za مشخصه را تعیین مینمایند. مشخصه نسبت به محور عمودی متقارن است. Zb در جهت معکوس نسبت به
ژنراتور اندازهگیری شده است. Zc امپدانس اندازهگیری شده ترانس در جهت مستقیم Zd امپدانس اندازهگیری شده نسبت به شبکه
است. مشخصه نوسان توان به دو بخش تقسیم میشود. بسته به اینکه مرکز الکتریکی کجا باشد، بردار امپدانس از یکی از
مشخصههای 1 یا 2 عبور خواهد کرد. عبور از محور عمودی مبنای تصمیم مشخصه خواهد بود. از آنجا که نوسانات توان متقارن
هستند اولین پیشنیاز، تقارن جریانهای اندازهگیری شده است؛ لذا بایستی جریان توالی مثبت از حد مشخصی بیشتر و جریان
توالی منفی از حدی کمتر باشد. همچنین آشکارسازی Out of step مستلزم ورود بردار امپدانس از یک سمت یکی از مشخصهها و
عبور از محور مجازی و خروج از سمت مخالف آن است. که این منجر به از دست رفتن سنکرون میشود (مانند موارد 1و2) ولی اگر از
محور مجازی عبور نکند و از همان سمت خارج شود سیستم مجددا پایدار خواهد شد.(موارد 3 و 4) تعداد عبورها توسط رله شمرده
میشوند. در صورتی که از حد مشخصی زیادتر گردند رله مطابق لاجیکی که در صفحه بعد آمده است تصمیمگیری مینماید.
 استارت واحد
استارت واحد
در ابتدای استارت واحد بایستی واحد تا 12 ساعت قبل از استارت در حالت ترنینگیر قرار داده شود تا مانع از وارد شدن تنشهای
حرارت به توربین باشد. در ابتدای زمان استارت ابتدا ولو ترنینگیر میبندد. با بسته شدن این ولو مطمئنا دور شفت افت پیدا میکند و
همزمان air dryer را off کرده و دمپر را باز میکند و همچنین پمپ و فنهای کولینگ را در سرویس قرار داده و پمپهای هیدرولیک
را فرمان auto on میدهد و همچنین سه SGC دیگر یعنی NG, LUBE OIL, FULE OIL را فرمان auto on میدهد و همزمان
shot off ولو گاز را باز میکند و بعد vent ولوهای گاز را میبندد.
همچنين SLCهاي (controller, positioner) IGV را on میکند همگی اين فرمانها با هم در يكی دو ثانيه داده میشود.
بعد اگر تمامی شرایط pre pure شدن SFC وجود داشته باشد (24 شرط) SFC PRE PURE شده و بریکر SFC میبندد و واحد
شروع به دور گرفتن میکند اگر حتی یکی از شروط PRE PURE شدن SFC وجود نداشته باشد ABORTED START (استارت ناموفق) داریم.
بعد از دور گرفتن واحد در دور 480 سویچ دوم ایگنیشن عمل میکند. در دور 600 استاپ ولو گاز باز میکند در این دور تا دور 800
بایستی شعله تشکیل شود وگرنه استارت ناموفق صورت میگیرد.
دور 1700 دور بحرانی بوده و بایستی ویبرهها چک شود.
در دوری معادل SFC 2100RPM از مدار خارج شود و محرک به جای ژنراتور گاز حاصل از احتراق چمبرها در دور 2480RPM، BLOW OFFهای مرحله 5 میبندد و در دور 2920-2960RPM، BLOW OFF مرحله 10 میبندد.
توضيح لاجیک واحد گازی
مراحل استارت واحد گازی V-94-2 بر طبق TXP
STEP 1:
- چک میکند که sfc نرمال بوده و block نباشد.
- فرمان باز شدن دمپر را صادر میکند.
STEP 2:
- AIR DRYER OFFمیشود.
- SLC مربوط به IGV CONTROLER ON شده و آماده فرمان گرفتن میشود.
- به پمپهای MAIN و AUX هیدرولیک فرمان AUTO ON داده میشود.
- SGC مربوط به NG فرمان AUTO ON داده میشود
- SGC مربوط به O فرمان AUTO ON داده میشود.
- SGCمربوط به LUBE OIL فرمان AUTO ON داده میشود.
- SGC مربوط به IGV POSITION CONTROLER فرمان AUTO ON داده میشود.
- به DRAIN VALVEها فرمان CLOSE داده میشود.
STEP 3:
- پمپ MAIN هیدرولیک ON میشود.
- از صفحه PER SELECTION Q01:ELEC مربوط به SYNC SEL بایستی در حالت NOT SELECTED باشد.
- PER SELECTمربوط به SYNC SELECT GCB در حالت NOT SELECTED باشد.
- PER SELECTمربوط به 6در حالت NOT SELECTED باشد.
- PER SELECTمربوط به VOLT CONTROLERدر حالت AUTO قرار میدهد.
- SLC مربوط به پمپهای کولینگ ONمیشود و یکی از پمپها را که قبلا SELECTشده ONمیکند.
- چک میکند ژنراتور بدون بار باشد (NO LOAD).
STEP 4:
- SGC مربوط به LUBE OIL بایستی به STEP 10رسیده باشد.
- SFC بایستی PRE PARED شده باشد.
- دمپر COMMAND OPEN را گرفته باشد.
- چک میکند BLOW OFFهای مراحل 5 و 10 باز باشد.
- چک میکند فنهای GT ENCLOSER ON باشد.
STEP 5:
- چک کردن دور توربین (سرعت)
STEP 6:
- چک کردن سرعت توربین
STEP 7:
چک میکند سرعت توربین نبایستی بیشتر از 8HZ یا 480RPM باشد.
STEP 8:
چک میکند SGC NG به STEP 10 خود رسیده باشد.
STEP 9:
- چک میکند که سرعت توربین به 6HZ یا 316RPM رسیده باشد و بریکر SFC EXT (OPEN) باشد.
STEP 10:
- چک میشود سرعت توربین به بیشتر از 49HZ رسیده باشد.
- ژنراتور بدون بار باشد.
- SELF CLEANING VALVE در حالت OPEN باشد. (در این STEPمیماند تا OPERATOR فرمان سنکرون را بدهد.)
STEP 11:
- GCBمیبندد.
STEP 12:
- تحریک ON میشود.
STEP 13 تا STEP 16:
- STABLEشدن شرایط جهت بارگیری
نتیجهگیری:
وظیفه سیستم حفاظت آن است که هر جزء از شبکه الکتریکی که دچار خطا یا اتصالی شده را در کمترین زمان ممکن از مدار خارج
سازد و به شکلی که احتمال خطر از بین رفته و کوچکترین بخش از شبکه الکتریکی مجزا گردد.
همین امر در شرایط بهرهبرداری غیرعادی نیز صادق است. سیستمهای حفاظتی نقش اساسی در ایمنی و پایداری و قابلیت اطمینان
سیستم برقرسانی را عهدهدار بوده و از شروع یا گسترش دامنه خسارات ناشی از خطاهای مختلف جلوگیری مینماید. همچنین
عملکرد مناسب سیستم حفاظت باعث کاهش سطح خاموشی میشود چرا که حداقل ناحیهای را که برای رفع عیب کافی است از
شبکه جدا نموده و باعث تداوم برقرسانی به قسمتهای دیگر شبکه میشود.
اجزای اصلی یک سیستم حفاظتی شامل رلهها، ترانسهای جریان و ولتاژ و کلیدها هستند که اختلال یا عدم کارکرد صحیح هر یک از
این اجزا باعث عملکرد نادرست سیستم حفاظت میگردد. در این میان رلهها وظیفه شناسایی خطا را بر عهده داشته و مهمترین جزء
سیستم حفاظتی میباشند.