بوجود آمدن و رشد ارتعاشات در ماشین آلات صنعتی یک پدیده مضر و نابهنجار است که علاوه بر کاهش عمر دستگاه و قطعات و بالاتر رفتن هزینه های تعمیر و نگهداری، موجب کاهش تولید و نیز کیفیت نهایی محصول می شود.
بسیاری از عیوب در هنگام نصب ماشین آلات برای تجهیزات بوجود می آیند و در بسیاری از موارد قابل ردگیری و برطرف کردن هستند. بعضی از این عیوب تا مدت ها با تجهیز باقی خواهند ماند و اختلالی در کارکرد آن بوجود نمی آورند. البته این امر به ماهیت دستگاه و شدت عیوب بستگی دارد. چه بسا که عیوبی مانند عدم تعادل جرمی (unbalance)، عدم هم محوری کوپلینگ ها (misalignment) ، و … همیشه وجود دارند اما با توجه به میزان حساسیت دستگاه و لول ارتعاشی در اکثر مواقع با شدت کم قابل تحمل هستند. اما در برخی موارد، عیوب مدتی بعد از ابتدای کارکرد دستگاه بوجود می آیند و با گذشت زمان بر شدت آنها افزوده می شود. میزان رشد این عیوب بسته به نوع عیب و کار کرد دستگاه می تواند متفاوت باشند.
 شکل 1- نمایی از فن دودکش
شکل 1- نمایی از فن دودکش
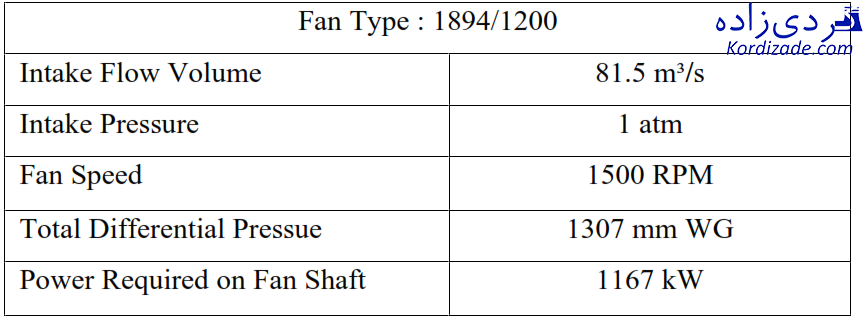 جدول 1- مشخصات فن هوای دودکش
جدول 1- مشخصات فن هوای دودکش
الکتروموتور فن دودکش مدول ۳ احیاء ۲ (22-3C2) یک الکتروموتور “مدیوم ولتاژ” ۱۳۰۰ کیلو وات می باشد (شکل ۲)، که بعد از تعویض در مدت زمان ۵۵ روز با افزایش تقریبأ ۶ برابری لول ارتعاشی overall آن از لرزش 0.8 میلیمتر بر ثانیه به لرزش ۴٫۶ میلیمتر بر ثانیه افزایش پیدا کرد. با توجه به افزایش لول ارتعاشی و نوسانات آن و همچنین رشد پیک هایی با ارزش فرکانسی پایین، تجزیه و تحلیل طیف فرکانسی با رزولوشن بالاتر(200HZ) بر روی این موتور انجام شد.
 شکل 2- نمایی از الکتروموتور فن دودکش
شکل 2- نمایی از الکتروموتور فن دودکش
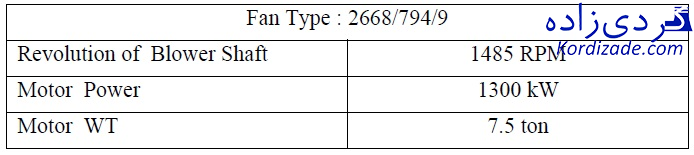 جدول 2- مشخصات الکتروموتور فن دودکش
جدول 2- مشخصات الکتروموتور فن دودکش
در بررسی های اولیه و تجزیه و تحلیل طیف فرکانسی مشخص گردید که علت اصلی افزایش لول ارتعاشی تغییر در اندازه دامنه هارمونیک های دور الکتروموتور می باشد. با توجه به نوسانات موجود در لول ارتعاشی، از یک دستگاه نشان دهنده فرکانس ها در محل استفاده شد که نشان داد علت نوسانات، کم و زیاد شدن دامنه پیک های هارمونیک دور می باشد (شکل ۳ و ۴).
Total value = 0.8153 mm/s RMS
BC = 0.64
Shaft Speed=1500 RPM
Bearing(s)=NU230,6230/C3
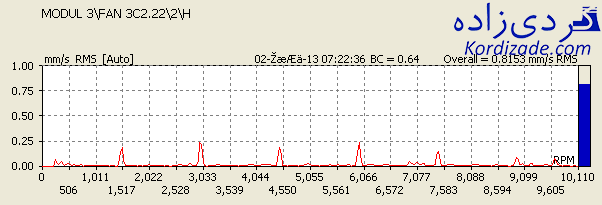 شکل 3- طیف ارتعاشی الکتروموتور
شکل 3- طیف ارتعاشی الکتروموتور
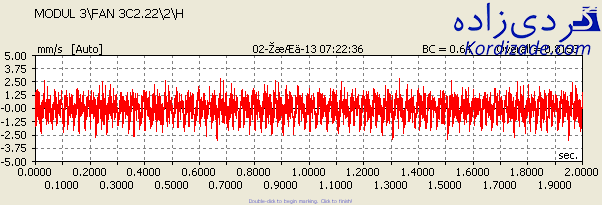 شکل 4- شکل موج طیف ارتعاشی الکتروموتور
شکل 4- شکل موج طیف ارتعاشی الکتروموتور
بررسی های بیشتر و تجزیه و تحلیل طیف فرکانسی نشان داد که بیشترین تحریک در هارمونیک فرکانس های اول، دوم و سوم دور بوجود می آیند. تغییر در لول این فرکانس ها و همچنین جهتی بودن آن نشان دهنده ناهمراستایی کوپلینگ ها می باشد. با توجه به کم و زیاد شدن دامنه کلی ارتعاش و همچنین پیک های یاد شده، یکی از دلایل این اشکال در میزان جابجایی پوینت های ارتعاشی بررسی شد.
Total value = 2.126 mm/s RMS
BC = 0.62
Shaft Speed=1500 RPM
Bearing(s)=NU230,6230/C3
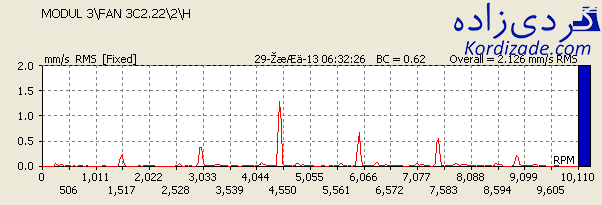 شکل 5- افزایش دامنه پیکهای هارمونیک سوم
شکل 5- افزایش دامنه پیکهای هارمونیک سوم
مقایسه و تجزیه و تحلیل طیف فرکانسی از نقطه نظر جابجایی بر حسب (um) نشان داد که میزان این تغیرات در هر داده برداری رشدی ۲ تا ۳ برابری دارد. این تغییرات نشان داد که تغییرات در همراستایی کوپلینگ ها و به هم خوردن وضعیت همراستایی امری منطقی و اجتناب ناپذیر است (شکل ۶).
Total value = 5.76 um
BC =1
Shaft Speed=1500 RPM
Bearing(s) = NU230,6230/C3
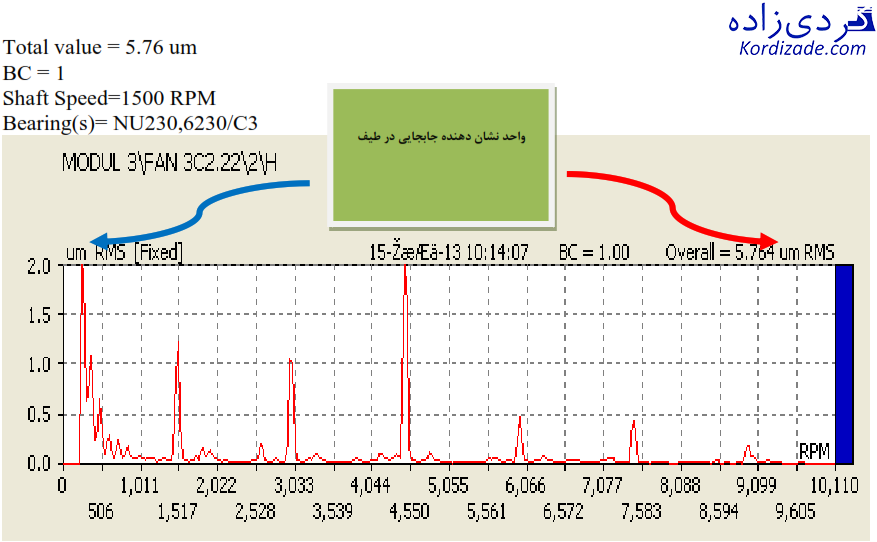 شکل 6- طیف فرکانسی موتور بر حسب جابجایی
شکل 6- طیف فرکانسی موتور بر حسب جابجایی
حال این پرسش مطرح میشود که علت اصلی بوجود آورنده ارتعاش چه عاملی میتوان باشد که در نهایت منجر به تغیرات در همراستایی و در نهایت لول ارتعاشی شده است. داده برداری های بعدی نشان داد که در ابتدای پیک هایی با فرکانس پایین و همچنین اطراف هارمونیک های دور موتور سایدبت هایی با اختلاف دور کم در حال رشد است (شكل ۷)
Total value = 2.534 mm/s RMS
BC = 1.29
Shaft Speed=1500 RPM
Bearing(s)= NU230,6230/C3
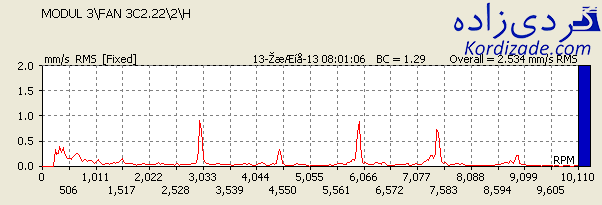 شكل 7- رشد پیکها در ابتدای طیف و بوجود آمدن ساید بندها
شكل 7- رشد پیکها در ابتدای طیف و بوجود آمدن ساید بندها
اندازه گیری ها به کمک طیف ارتعاشی ۲۰۰ هرتز نشان داد که این پیک ها مربوط به فرکانس افت دور روتور (Slip) نصبت به فرکانس برق شهر یا همان ۵۰ هرتز می باشد که با ضرب ان ها در تعداد قطب ، فرکانس (ppf) یا بدست می آید. این فرکانس یکی از راه های تشخیص عیوب روتوربار می باشد که البته ممکن است نشان دهنده خرابی ها و عیوب مختلف در این قسمت از موتور باشد.
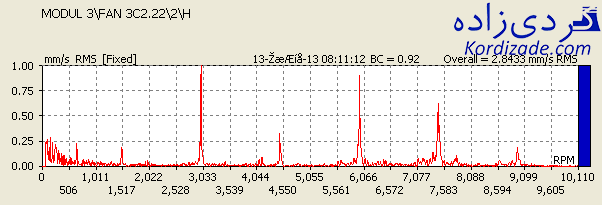 شکل 8- طیف ۲۰۰ هرتز جهت تفکیک پیکها
شکل 8- طیف ۲۰۰ هرتز جهت تفکیک پیکها
بررسی ساختمان موتور الکتریکی
قبل از پرداختن به عیوب احتمالی که ممکن است در یک موتور الکتریکی بوجود آید، ابتدا ساختمان یک موتور الکتریکی را در شکل زیر مشاهده می کنیم (شکل 9).
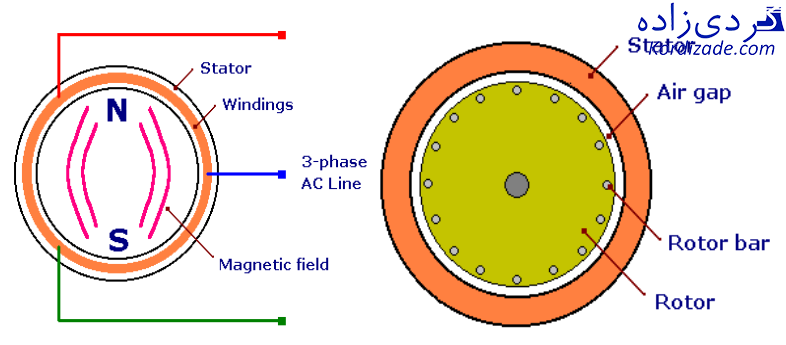 شکل 9- ساختمان یک موتور الکتریکی
شکل 9- ساختمان یک موتور الکتریکی
دور روتور در موتور الکتریکی کمی کمتر از دور میدان مغناطیسی است و رمز موفقیت در عیب یابی موتورهای القائی آگاهی از این موضوع است. میدان مغناطیسی دوار به دلیل قطع بارها ، جریان الکتریکی در آنها القاع می کند. جاری شدن جران الکتریکی در در اطراف روتور میدان مغناطیسی ایجاد می کند که دافع میدان مغناطیسی اصلی است. در نتیجه تداخل ۲ میدان مغناطیسی ، ترکی بر روی روتور ایجاد می شود که باعث گردش روتور می شود. بنابراین چرخش روتور وابسته است به قطع میدان مغناطیسی و به همین منظور می بایست دور روتور از دور میدان مغناطیسی استاتور کمتر باشد. این حالت اساسی ترین فرکانس های یک موتور الکتریکی را ایجاد می کند که برای عیب یابی یک موتور الکتریکی القائی دانستن آن ها ضروری است.
از جمله عیوبی که می تواند در یک موتور بوجود آید میتوان به اکسنتریکی در روتور ، ترک خوردگی ، دفورمیشین ناشی از گرمایش محلی ، لقی در کانکترهای استاتور و سر خوردن روتوربار اشاره کرد. البته عیوب دیگری نیز در این مجموعه می تواند بوجود آید که هر کدام می تواند نشانه های متفاوتی در طیف ارتعاشی بوجود آورند. عیوبی که ناشی از نصب ناصحیح تجهیز باشند، از قبیل سافت فوت که علائمی از قبیل نمایان شدن فرکانس روتوربار و افزایش آن را به همراه دارند.
به طور کلی تمامی عیوبی که موجب تحریک و یا اختلال در عملکرد استاتور شوند ، فرکانس های برق شهر و دو برابر آن را بوجود می آورند. عیوبی از قبیل پیچیدگی در استاتور ، لقی کانکتورها، عدم تعادل فازی و … که در تمامی آنها به دلیل ثابت بودن محل اشکال و چرخش میدان مغناطیسی و تحریک آن در قسمت مشکل دار ، فرکانس های برق شهر و دو برابر آن را تحریک می کنند. البته میدان مغناطیسی نامتعادل در برخورد با روتور بارها فرکانس دیگری به نام (RPF) بوجود می آورند که برابر است با دور فرکانس برق شهر ضرب در تعداد بارهای استاتور . بررسی های طیف ارتعاشی با رزولوشن بالاتر نشان داد که در واقع هیچ علائمی از این فرکانس ها در این مدت در طیف رشد نکرده و مقدار آنها ثابت بوده است. بدیهی است که این فرکانس ها در ماهیت کار موتور وجود دارند و مقدار آنها برای هر الکتروموتوری در حد دهم میلیمتر بر ثانیه در دامنه فرکانس قابل قبول است. در زیر تجزیه و تحلیل طیف فرکانسی موتور قابل مشاهده است.
Total value = 2.598 mm/s RMS
BC = 0.60
Shaft Speed=1500 RPM
Bearing(s)= NU230,6230/C3
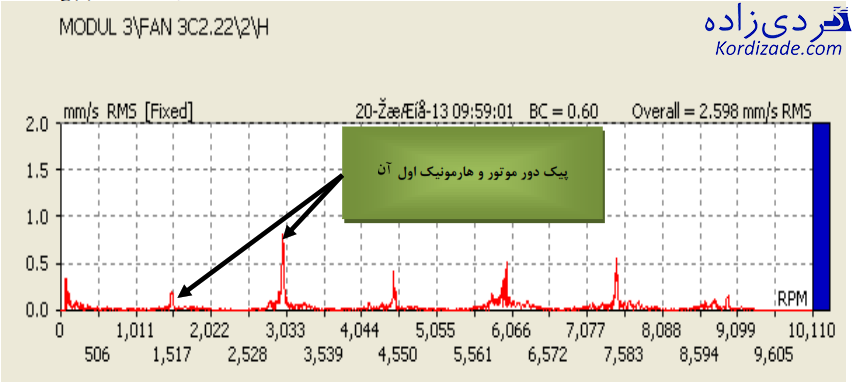 شکل 10- طیف ارتعاشی الکتروموتور با فرکانس ۲۰۰ هرتز
شکل 10- طیف ارتعاشی الکتروموتور با فرکانس ۲۰۰ هرتز
این بررسی ها و تجزیه و تحلیل طیف فرکانسی نشان داد که در واقع اشکال احتمالی این موتور مربوط به عیوب استاتور که شامل پیچیدگی در بدنه یا لقی کانکتورهای آن و یا عیوب مربوط به برق شهر نمی باشد.
Total value = 3.095 mm/s RMS
BC = 0.52
Shaft Speed=1500 RPM
Bearing(s)= NU230,6230/c3
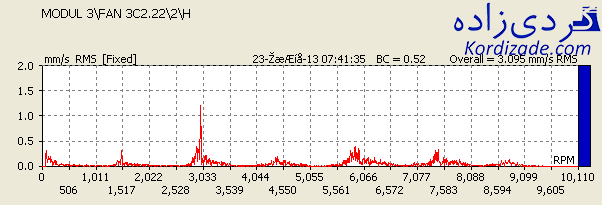 شکل 11- طیف ارتعاشی الکتروموتور با فرکانس ۲۰۰ هرتز
شکل 11- طیف ارتعاشی الکتروموتور با فرکانس ۲۰۰ هرتز
با افزایش لول ارتعاشی و همچنین شدت گرفتن نوسانات موتور، پیک های ظاهر شده در طیف اطلاعات بیشتری را در خصوص عیوب احتمالی نشان دادند. فرکانس خواب دور موتور یا (ppf) مشخصه این پیک ها می باشد که در ابتدای طیف و اطراف هارمونیک های دور در حال رشد می باشند.
رشد فرکانس های (Slip) دلایل مختلفی میتواند داشته باشد. از جمله این عیوب میتوان به اکسنتریسیتی در روتور ، ترک خوردگی در روتوبارها ، لوز بودن روتوربار و … اشاره کرد. هر کدام از عیوب بالا دارای نشانه های خاصی در طیف فرکانسی هستند. البته بعضی از نشانه های مشترک نیز در بین آنها وجود دارد. به عنوان مثال رشد فرکانس های (Slip) در اطراف فرکانس دور موتور و هارمونیک های آن در ترک خوردگی روتور بارها و اکسنتریسیتی مشابه است و نوسانات لرزش به دلیل متغییر بودن ایرگپ دوار در هر دو عیب وجود دارد. جهت تفکیک این دو عیب از هم باید به رشد ارتعاش و دامنه فرکانس های خواب موتور استناد کرد. زیرا در ترک خوردگی این فرکانسها با گسترش ترک رشد میکنند اما در اکسنتریسیتی بدلیل ثابت بودن میزان انحنا این مقدار تقریبأ ثابت خواهد بود. در لوز بودن روتوربار نیز هارمونیک های دور میزان قابل توجهی از لول ارتعاشی را به خود اختصاص خواهند داد. همچنین بدلیل سر خوردن روتوربار بر اثر تغییرات لود بر روی موتور یا ولتاژ تغذیه موتور این مشکل به صورت مقطعی ظاهر میشود. از جمله مشخصه های دیگر لوز بودن روتور بار بوجود آمدن فرکانس (RBF) میباشد که برابر است با تعداد بارهای روتور ضرب در دور موتور که با سایدبندهای برق شهر همراه است (شکل ۱۲).
حال با توضیحات داده شده این پرسش مطرح میشود که لرزش موتور الکتریکی ما از کدام یک از عیوب فوق ناشی میشود. در ادامه تجزیه و تحلیل طیف فرکانسی و نحوه تغییرات طیف ارتعاشی موتور را بررسی می کنیم تا از روند این مشاهدات عیب احتمالی مشخص شود.
Total value = 4.580 mm/s RMS
BC = 0.79
Shaft Speed=1500 RPM
Bearing(s)=NU230,6230/C3
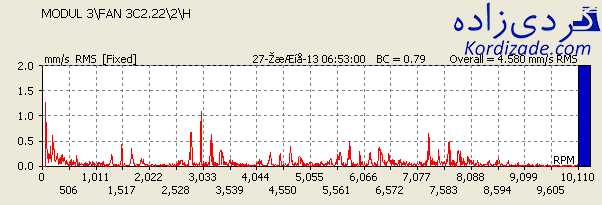 شکل 12- رشد طیف ارتعاشی الکتروموتور در فرکانس ۲۰۰ هرتز
شکل 12- رشد طیف ارتعاشی الکتروموتور در فرکانس ۲۰۰ هرتز
بررسی طیف ارتعاشی نشان میدهد که به دلیل رشد دامنه ارتعاشات، امکان اکسنتریسیتی در روتور و یا وجود ترک کمتر وجود دارد، زیرا هر کدام از عوامل فوق موجب افزایش پیک دور کاری موتور شده و مقدار نابالانسی را افزایش می دهد. همچنین بدلیل ثابت بودن تغییرات ارتعاشات در برابر تغییرات لود و نرمال بودن جریان مصرفی الکتروموتور، امکان لوز بودن روتور نیز وجود ندارد.
با این حال تجزیه و تحلیل طیف فرکانسی نشان دهنده افزایش دامنه و تعداد هارمونیک های دور می باشد که در اطراف آنها فرکانس (ppf) در حال رشد است. از جمله شرایطی که میتواند این حالت را بوجود آورد، افزایش لقی و به هم خوردن گپ بین روتور و استاتور است.
با توجه به افزایش لول ارتعاشی، در نهایت الکتروموتور تعویض گردید. به دلیل حساسیت موضوع و پیدا کردن عیب جهت برطرف کردن آن اقدام به بررسی اجزای داخلی موتور گردید.
تست های انجام شده بر روی استاتور نشان دهنده سالم بودن سیم پیچ آن بود. در چک ظاهری و بررسی دقیق روتور نیز هیچ گونه علائمی از وجود ترک در میله های روتور نداشت، اما در قسمت استاتور علائمی از وجود سایش بین این قسمت با بخشهایی از روتور وجود داشت (شکل ۱۳).
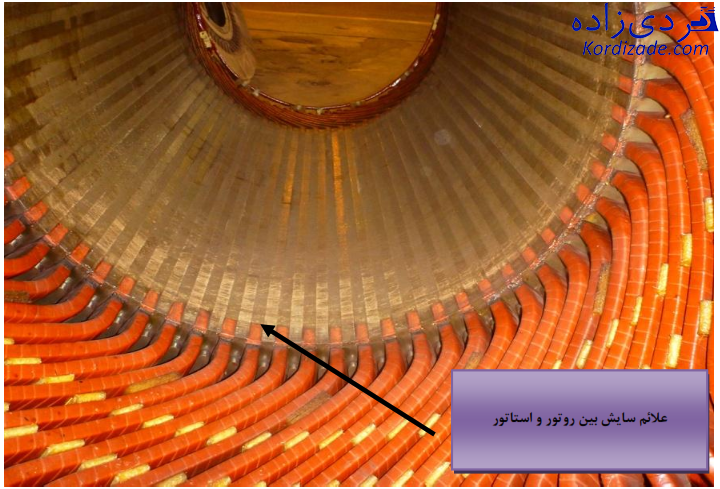 شكل 13- سایش بین روتور و استاتور
شكل 13- سایش بین روتور و استاتور
این برخوردها نشان دهنده از بین رفتن گپ بین روتور و استاتور می باشد که در حالت نرمال تفاوت ایر گپ در قطر نباید بیشتر ۵٪ در موتورهای القائی و ۱۰٪ در موتورهای سنکرون باشد.
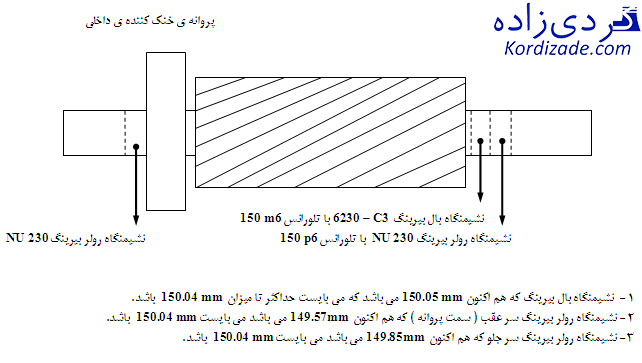
توجه به این شواهد بررسی های بیشتری بر روی روتور این الکتروموتور انجام شد که مشخص شد فیلر استادارد برینگ ها در محدوده مجاز است اما انطباق بین کتس داخلی رولر برینگ ها و شافت روتور تا حد زیادی به هم خورده است. این اشکال در زمان دمونتاژ برینگ ها از روی شافت مشخص شد. با توجه به اینکه انطباق این برینگ ها با شافت پرسی می باشد در موقع دمونتاژ می بایست با گرم کردن و یا از طریق برشکاری از روی شافت آزاد شوند اما این برینگ ها آزادانه و به صورت سرشی از رو شافت خود خارج شدند. اندازه گیری های نشیمنگاه این برینگ ها نشان داد که در واقع کنس داخلی برینگ های رول لقی بالایی داشته است.
 شکل 14- نشیمنگاه رولربرینگ سر عقب
شکل 14- نشیمنگاه رولربرینگ سر عقب
 شکل 15- نشیمنگاه بال و رولر برینگ سر جلو
شکل 15- نشیمنگاه بال و رولر برینگ سر جلو
اندازه گیری توسط میکرومتر از نشیمنگاه کنس داخلی رول برینگ ها صحت این موضوع را تائید کرد. در زیر این رکوردها به همراه میزان صحیح آن نمایش داده شده است.
 در تصاویر (۱۴ و ۱۵) نیز مشخص است که سطح نشیمنگاه رولر برینگ ها دچار خستگی سطحی شده است. این عامل سبب بوجود آمدن لقی روتور در استاتور شده و با گسترش این عیب بدلیل سایش با کشس داخلی رولرها، فرکانس های متغییر روتوربار دچار رشد شده و لول ارتعاشی را افزایش دادند. با مشخص شدن عیب دستگاه، در جهت برطرف کردن آن اقدام به تعویض مجموعه روتور شد. پس از تعویض روتور و جمع کردن اجزای موتور جهت تست نتیجه، الکتروموتور استارت شده و از آن طیف فرکانسی گرفته شد. در نتایج تجزیه و تحلیل طیف فرکانسی مشخص شد که عیوب مجموعه به طور کامل از بین رفته است. در زیر این طیف قابل مشاهده است.
در تصاویر (۱۴ و ۱۵) نیز مشخص است که سطح نشیمنگاه رولر برینگ ها دچار خستگی سطحی شده است. این عامل سبب بوجود آمدن لقی روتور در استاتور شده و با گسترش این عیب بدلیل سایش با کشس داخلی رولرها، فرکانس های متغییر روتوربار دچار رشد شده و لول ارتعاشی را افزایش دادند. با مشخص شدن عیب دستگاه، در جهت برطرف کردن آن اقدام به تعویض مجموعه روتور شد. پس از تعویض روتور و جمع کردن اجزای موتور جهت تست نتیجه، الکتروموتور استارت شده و از آن طیف فرکانسی گرفته شد. در نتایج تجزیه و تحلیل طیف فرکانسی مشخص شد که عیوب مجموعه به طور کامل از بین رفته است. در زیر این طیف قابل مشاهده است.
Total value = 1.930 mm/s RMS
BC = 0.43
Shaft Speed=1500 RPM
Bearing(s)= NU230,6230/C3
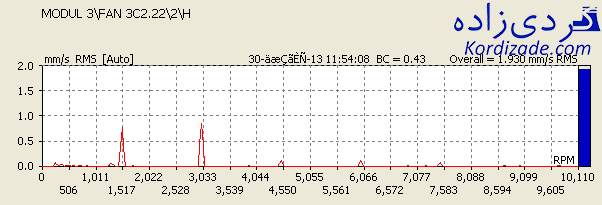 شکل 16- طیف ارتعاشی پس از تعویض روتور
شکل 16- طیف ارتعاشی پس از تعویض روتور
بحث و نتیجه گیری تجزیه و تحلیل طیف فرکانسی
در این مقاله سعی شد روشی صحیح برای عیوب احتمالی ناشی از لقی در نشیمنگاه برینگ الکتروموتورهای مدیوم ولتاژ بر اساس تجزیه و تحلیل طیف فرکانسی الکتروموتور و تفکیک عیوب ساکن و دوار در این تجهیزات ارائه شود. در این روش پایش، با توجه به فرکانس های تولید شده از دستگاه، دسته بندی و ردگیری آنها و همچنین حذف عیوب غیر ممکن به تدریج از تعداد عیوبی که میتواند در یک دستگاه وجود داشته باشند و در تحلیل مشخص شوند، کاسته می شود و در نهایت عیب تشخیص داده شده با اشکالاتی که در دستگاه وجود دارند بسیار نزدیک و یا حتی میتواند خود آن عیب باشد. این نکته را نیز باید مد نظر قرار داد که تشخیص صحیح یک عیب میتواند نتیجه موثری در هنگام برطرف کردن آن داشته باشد.
منبع: محمد جواد مهرابیان، مهران پاک بین، ” تشخیص لقی در نشیمنگاه بیرینگ موتور مدیوم ولتاژ از طریق آنالیز فرکانسی روتور” ، هشتمین کنفرانس تخصصی پایش وضعیت و عیب یابی ماشین آلات، ایران، دانشگاه صنعتی شریف، اسفند ۱۳۹۲
1 دیدگاه در “تجزیه و تحلیل طیف فرکانسی ارتعاشات روتور – مثال واقعی”
مقاله مفید و آموزنده ای بود .سپاس از شما🙏💐